
ID : 3184
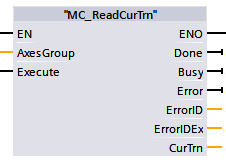
MC_ReadCurTrn
To return the current position of the robot by homogeneous translation type data.
| Graphic expression | FB No. | FB category |
|---|---|---|
 |
FB2105 | Non motion |
Input parameter
| Parameter name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | Integer | 1 or larger | 1 | No |
|
||||
| Execute | Boolean |
|
False | No |
|
||||
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output parameter
| Parameter name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
|
| CurTrn | eRC_Trans |
|
Function description
- About Homogeneous Translation Type
-
Data type expressing robot's teaching position. This data type is expressed by three-dimensional space coordinates, a rotation angle and FIG elements representing robot figures. A rotation angle is expressed by each coordinate element of the orient vector and the approach vector. The number of elements is 10.
- X, Y, Z
- Coordinates of X, Y and Z axes from the work coordinate origin.
- Ox, Oy, Oz
- X-, Y-, and Z-axis elements of the orient vector.
- Ax, Ay, Az
- X-, Y-, and Z-axis elements of the approach vector.
- FIG
- FIG component representing the Robot Figure (6th-Axis, 4th-Axis).
Attention
-
ID : 3184