
ID : 3349
Send and Receive Project Data
To send and receive project data to/from the RC8 robot controller (hereafter, RC8 series) or the MC8 series motion controller (hereafter, MC8 series), the following tools are available.
The cooperative control dual arm tool is software that is installed at the installation of WINCAPSIII simultaneously.
This section describes how to operate these tools.
Send and Receive with the Cooperative Control Dual Arm Tool
The cooperative control dual arm tool sends and receives Robot0 and Robot1 data together.
Do the following steps.
1
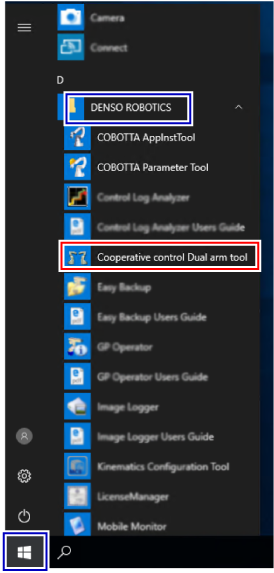
Start the cooperative control dual arm tool.
(The figure below shows a sample image of Windows 10) |
2
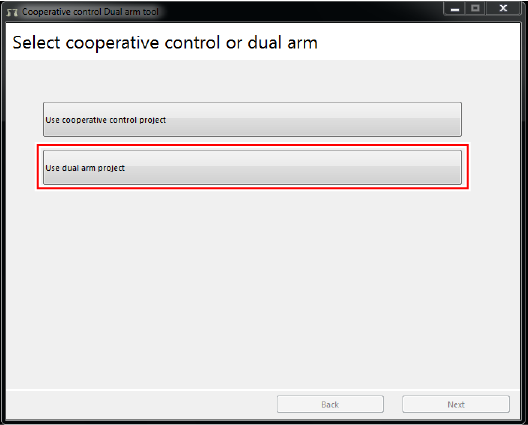
Select [Use dual arm project].
3
Select [Transfer data of dual arm project.]. In the [Project] text box, enter the project file of the dual arm control project to transfer. For the project file entry, enter the folder path of the target project file with the absolute path.
For the project file entry, enter the Robot0 project file. (For information about folder structure of the project data, refer to "Concept of the Dual Arm Control Project".) If you enter the Robot1 project file, the data transfer fails.
The IP address of the RC8 series or the MC8 series used as a transfer destination or receiving source are selected from the IP addresses that have been specified in the project of the entered project file. IP addresses are not specified in the cooperative control dual arm tool. Be sure to check the IP addresses beforehand. The following shows how to check the IP addresses.
- IP address of project : "Communication Setting" in the "WINCAPSIII GUIDE".
- IP address of RC8 or MC8 series : "Displaying and Changing Communication Settings Screen" in the "TEACH PENDANT OPERATION GUIDE".
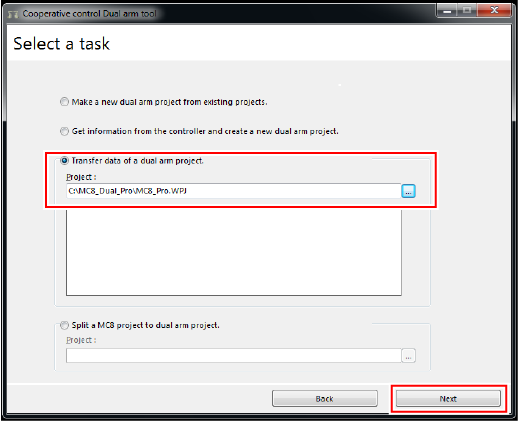
Enter the project file, and then click [Next].
4
Select [Send] or [Receive], and then click [Next] to execute the selected operation.
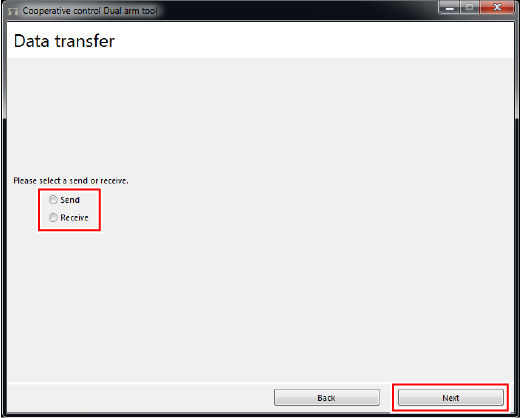
This completes the data transfer operation.
Send and Receive with WINCAPSIII
Basically, the operation procedure is the same as when you send normal project data.
This page describes the dual arm control project-specific information in the following categories.
To Send/Receive a Dual Arm Control Project under Edit-State
From the WINCAPSIII, on the menu bar, click [Connect], select [Transfer Data...]. [Transfer Data] window appears. To send/receive data, use this window.
However, transferable data differs depending on the project data you open. (For information about folder structure of the project data, refer to "Concept of the Dual Arm Control Project".)
- When Robot0 project data opens
-
Both Robot0 and Robot1 data can be sent and received. However, you cannot select some part of Robot1 data to transfer. All Robot1 data will be sent and received.
- When Robot1 project data opens
-
Only Robot1 data can be sent and received.
To Receive a Dual Arm Control Project Data as a New Project
This case is applied when you add a new project data to the RC8 or MC8 series if the RC8 or MC8 series already has any dual arm control project data.
In this case, when creating a new project, on the WINCAPSIII Project wizard, select [Get information from the controller for creating a new project]. WINCAPSIII will receive project data of both Robot0 and Robot1 (dual arm control project data).
For information about operation method, refer to "Creating a New Project" in the "WINCAPSIII GUIDE".
ID : 3349