
ID : 5084
Preparation for the Gain Tuning
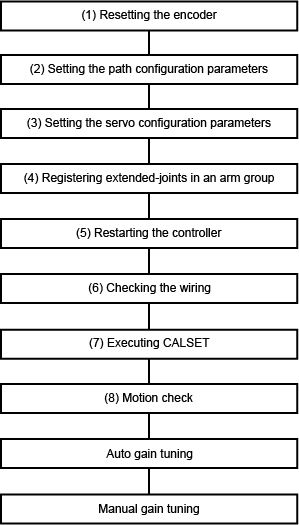
The flowchart below shows a necessary process for the auto gain tuning.
Description of each process
(1) Resetting the encoder
Reset the encoder when an encoder-related error occurs.
(2) Setting the path configuration parameters
Set the motion conditions of the extended-joints. (Speed, acceleration, motion limits, etc.)
(3) Setting the servo configuration parameters
Set the gain tuning for the extended-joints servo system.
(4) Registering extended-joints in an arm group
In order to control the extended-joints from program, register extended-joints into an arm group.
(5) Restarting the controller
Restart the robot controller to validate changes or registered settings that you have done in "Setting the path configuration parameters", "Setting the servo configuration parameters" or "Registering extended-joints in an arm group".
New settings will go into effect when the controller is turned off and then on after the settings are changed.
(6) Checking the wiring
Check the brake wiring, encoder wiring and motor wiring.
(7) Executing CALSET
Execute CALSET.
(8) Motion check
Run the optional mechanism connected to the motor manually in Joint mode and checks the motion.
ID : 5084