
ID : 7260
Specifications
This section describes the COBOTTA specifications according to the following categories.
- Product Name
- Motion
- Outer Dimensions and Mass
- Structure
- Environment Conditions of Installation Site
- Function
- Communication with an External Device (I/F)
- Programming
- Power Source
- Information for Safety
- Information on standards
- Warranty Information
- Model Type
Product Name
| Product name | COBOTTA |
|---|
Motion
| Accuracy |
Position repeatability±0.05 mm |
|---|---|
|
Force |
Maximum payload
|
Maximum allowable moment
|
|
Maximum allowable inertia moment
|
|
| Workable space |
Workable spaceSee the linked page (PDF:310KB) about workable space. |
Motion angle of each axis
|
|
| Maximum speed at the manual operation | 250 mm/s |
Outer Dimensions and Mass
| Overall arm length | 342.5 mm |
|---|---|
| Dimension | See the linked page (PDF:310KB) about dimension. |
| Mass | About 4 kg |
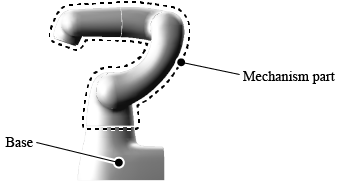
| Total mass of mechanism part |
About 2.4 kg (mechanism part means all the COBOTTA part other than base part)
|
| Position of the center of gravity | For information about position of the center of gravity in the packing posture, refer to "this page (PDF:877KB)" |
Structure
| Number of axis | 6 |
|---|---|
| Drive motor | Brushless motor |
| Brake | Brakes are equipped in 1st to 5th axis. |
| Degree of protection |
|
| Installation type | Floor-mount |
| Noise (Equivalent continuous A-weighted sound pressure level) |
55 dB or less (Measured with the rated payload and the maximum speed of the factory default setting) |
| Battery for keeping date/time |
|
Environment Conditions of Installation Site
| In storage/ In transportation | In operation | |
|---|---|---|
| Ambient temperature | -10 ℃ to 60 ℃ | 0 ℃ to 40 ℃ |
| Relative temperature | 20 %RH to 80 %RH (no dew condensation allowed) | |
| Vibration | 29.4 m/s² (3 G) or less | 4.9 m/s² (0.5 G) or less |
| Altitude | -- | 1,000 m or less |
| Levelness | 0.5° | |
| Flatness of the mount | 0.1/500 mm | |
| Defacement (pollution) degree | 2 (*1) | |
| Over-voltage category | II (*2) | |
|
Environmental prohibition |
|
|
*1: Pollution degree 2 is equivalent to household and office environment.
*2: Overvoltage category II refers to energy consuming equipment to be supplied from fixed installation (such as outlet).
Function
|
Electric gripper for COBOTTA (Option) |
|
|---|---|
Electric vacuum generator (Option) |
|
|
AF camera (N10-W02) (Option) |
Standard OS version
OSS versionNot available |
Communication with an External Device (I/F)
|
I/O |
NameMini I/O |
|||
|---|---|---|---|---|
I/O port numbers
|
||||
I/O allocationSee "I/O allocation". |
||||
Voltage
|
||||
Cable (Option)
|
||||
|
Ethernet |
|
|||
| USB | USB2.0 × 2 | |||
|
External display output (Option) |
|
Programming
Standard OS version
| Programming language |
Programming with COBOTTA-original icons or with DENSO robot language (PacScript) |
|---|---|
| Memory size |
|
| Teaching method |
|
OSS version
| Programming language |
C++, Python, Java, Lisp and others. |
|---|---|
| Teaching method | Teaching method is not provided by the system. Please create necessary function by customer. |
Power Source
| Power supply |
|
|---|---|
| Maximum input current | 2.5 A |
| Power consumption | 180 W |
| Weight of AC adapter | 860 g |
| Leakage current values |
|
Information for Safety
| Inherent safety design |
|
|---|---|
| Error display |
Standard OS versionLED indicates the operation status (such as, Normal state, error-occurrence state, and direct teaching state) with the light color and the lighting state (flush/light-up) For details, refer to "Status Display LED" of "Precautions while Robot is Running". OSS versionThe color and lighting interval of LED can be controlled as you like. Therefore, to use COBOTTA as an industrial robot, customers need to make the robot comply with the related standard · regulation by customers. |
Safety-Related Control System
|
Safety function |
Emergency stop functionFunctions to stop COBOTTA forcibly (The function to output the status of the emergency stop (Emergency stop box status output) is not included in the safety-related control systems.)
|
|||
|---|---|---|---|---|
Protective stop functionFunctions to stop COBOTTA forcibly (able to resume the operation from the suspended point)
|
||||
Speed limit functionFunctions to monitor the speed of COBOTTA and stop COBOTTA when it exceeds the speed limit
|
||||
Torque limit functionFunctions to monitor the torque of COBOTTA and stop COBOTTA when it exceeds the torque limit
|
||||
Axis limit functionFunctions to monitor the axis of COBOTTA and stop COBOTTA when it exceeds the angle limit
|
||||
| Safety performance | For the safety performance, such as PL and MTTFd, refer to "Safety Performance of Safety-related Control System". | |||
| Stopping performance | For the stopping performance, such as stop distance and stopping time, refer to "Stopping Performance of Safety-related Control System". | |||
| Structure of functions |
For the structure of functions, refer to "Function Configuration of Safety-related Control System". |
COBOTTA equips speed monitoring function on each axis. This function stops the robot motion when each axis exceeds the predetermined monitoring speed limit.
However, this function does not not guarantee safety for all situations. Perform a risk assessment and take additional safety measures depending on your needs.
Information on standards
Standard OS version
| Applied standards |
|
|---|---|
| Applied EU Directives |
|
| Standards and safety functions certified by third-party certification body |
For information about the certificate, refer to this(PDF:892KB). |
| Declaration of Incorporation | For about declaration of incorporation, click "here (PDF:29KB)" |
The CE mark on the COBOTTA label is applied in accordance with the following Directives.
- EMC Directive 2014/30/EU
- RoHS Directive 2011/65/EU, (EU)2015/863
Note that COBOTTA falls into the category of partly completed machinery in Machinery Directive 2006/42/EC. Therefore the CE mark does not correspond to the Machinery Directive.
OSS version
| Applied standards |
|
|---|---|
| Applied EU Directives |
|
| Standards and safety functions certified by third-party certification body |
For information about the certificate, refer to this(PDF:647KB). |
| Declaration of Incorporation | For about declaration of incorporation, click "here (PDF:28KB)" |
The CE mark on the COBOTTA label is applied in accordance with the following Directives.
- EMC Directive 2014/30/EU
- RoHS Directive 2011/65/EU, (EU)2015/863
Note that COBOTTA falls into the category of partly completed machinery in Machinery Directive 2006/42/EC. Therefore the CE mark does not correspond to the Machinery Directive.
Warranty Information
| Warranty information | See "Warranty". |
|---|
Model Type
| Model type | Refer to "Model Type". |
|---|
ID : 7260