
ID : 1506
Accelerated/Decelerated Absolute Movement and Grip Mode
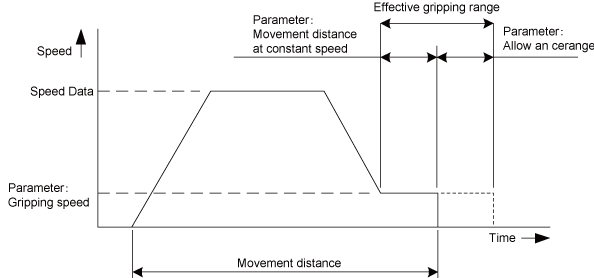
In the Accelerated/Decelerated Absolute Movement and Grip mode, the fingers move until they almost gets to the position specified as a current position utilizing trapezoidal speed control. The gripping force specified in parameter becomes valid. If the fingers grip the workpiece within the specified limit width and constant-speed movement zone, HOLD and ZON signals are output. If the fingers grip the workpiece exceeding the effective gripping range, the fingers stop moving at the position (movement distance + limit width) and INPOS signals are asserted while the HOLD signal is deasserted. Parameters can be checked and edited at "Parameter Setting Screen of the Eelectric Gripper ". If the fingers grip a workpiece out of the effective gripping range, the ZON signal is deasserted after the HOLD signal is asserted.
ID : 1506