
ID : 1612
Changing Path in Restarting the Pass Motion
If the robot is stopped in the pass motion, one of the following two options can be selected as the path to be used when the pass motion is restarted.
- Move the robot end to the target position after restarting the pass motion.
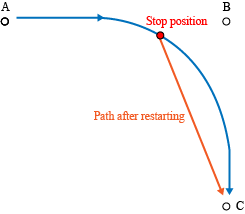
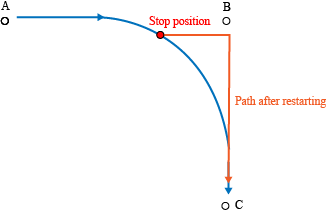
- Execute the pass motion to the target position on the path previously defined (PTP control) and to the target position on the path newly defined after restarting.
Changing the Robot End Path
To change the trajectories in restarting the pass motion, change "Pass Motion setting " configuration List.
Setting the Criteria for Passing Near the Target Position before Starting the Pass Motion
Setting the Criteria for Passing Near the Target Position before Starting the Pass Motion
Despite the setting to pass near the target position before starting the pass motion,
an option is available to move toward the target position after starting the pass motion, depending on the stop position during the pass motion.
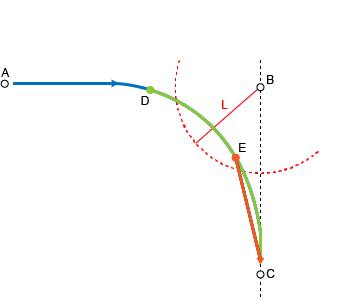
The setting item is a distance from the target position before starting the pass motion to the stop position.
Let us call the distance L.
If the straight line movement from A to B and from B to C as shown below is considered as a pass motion,
the robot that stopped at D will run toward B after restarting but the robot that stopped at E will run directly to C, instead of moving toward B.
To change the L value, change the "Positioning Allowance of Pass End" configuration parameter.
The unit is mm. The change procedure is the same as for that for "Pass Motion setting" configuration parameter.
Notes
The set values are given to provide an approximate range and are not guaranteed absolute positions.
Even changing those values will sometimes bring no actual operation, depending upon the current running speed or the interpolation method.
While the cooperative control is used, if values of the "Pass Motion setting" configuration parameter are different between a master robot and a slave robot, or if the parameter is set to 1 for all robots, those robots may not move to their target positions synchronously when Continue Start is executed during the synchronous motion. Therefore, set to 0 of the "Pass Motion setting" configuration parameter for all robots.
ID : 1612