
ID : 1700
Turning OFF Motor
Some robot types may not have brake function in their joints.
If joints do not have brake function, retention torque will be dissipated when motor is turned off; hence, robot may move unexpectedly due to the gravity or other external forces. Note that this is very dangerous.
It is necessary to turn off motor if any of the following is applicable.
- Enter to the motion space of robot.
- Turn off the controller.
- Move robot with hands.
- Modify parameters.
- Load task (user) program.
- Execute CALSET (Select joint to be calibrated, or cancel the selection).
- Cancel any of joint brakes.
Operation procedures
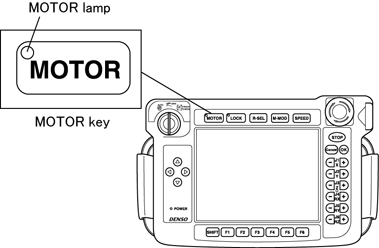
Release the deadman switch to turn off motor when in manual mode.
Motor can be turned off while the deadman switch is pressed.
In that case, press MOTOR key. MOTOR lamp turns off. MOTOR lamp is embedded in MOTOR key.
ID : 1700