
ID : 2013
Hand IO Window
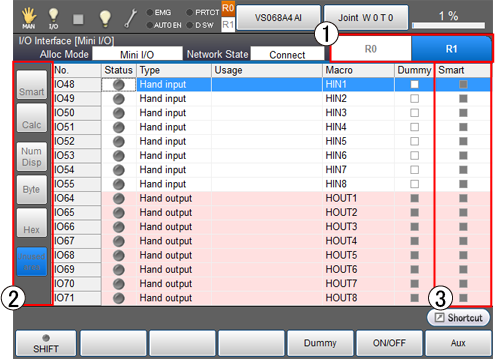
In the cooperative control function, robot selection tab is allocated on the IO interface window. You can check and set the Hand IO status on each robot on this window.
For details about IO window, refer to "Displaying and Operation of I/O" in the TEACH PENDANT MANUAL.
| No | Function | Description |
|---|---|---|
| 1 | Robot selection button | Select a robot that you want to check the IO. R0 indicates the leader robot. Selecting R0 shows all I/Os connected to the master controller. Since the rest of robots (follower robots) connect with Hand IO only, selecting other than R0 will display only Hand I/O. The initial setting is R0. |
| 2 | Side bar | These buttons are available only when R0 is selected. |
| 3 | Smart | Smart setting is available only when R0 is selected. |
| Available function keys | |
|---|---|
| [F4 Dummy] | Enable/Disable the dummy IO on a robot that is selected by Robot selection button. |
ID : 2013