
ID : 1995
Setup Procedure
The figure below shows the setup procedure for the cooperative control function.
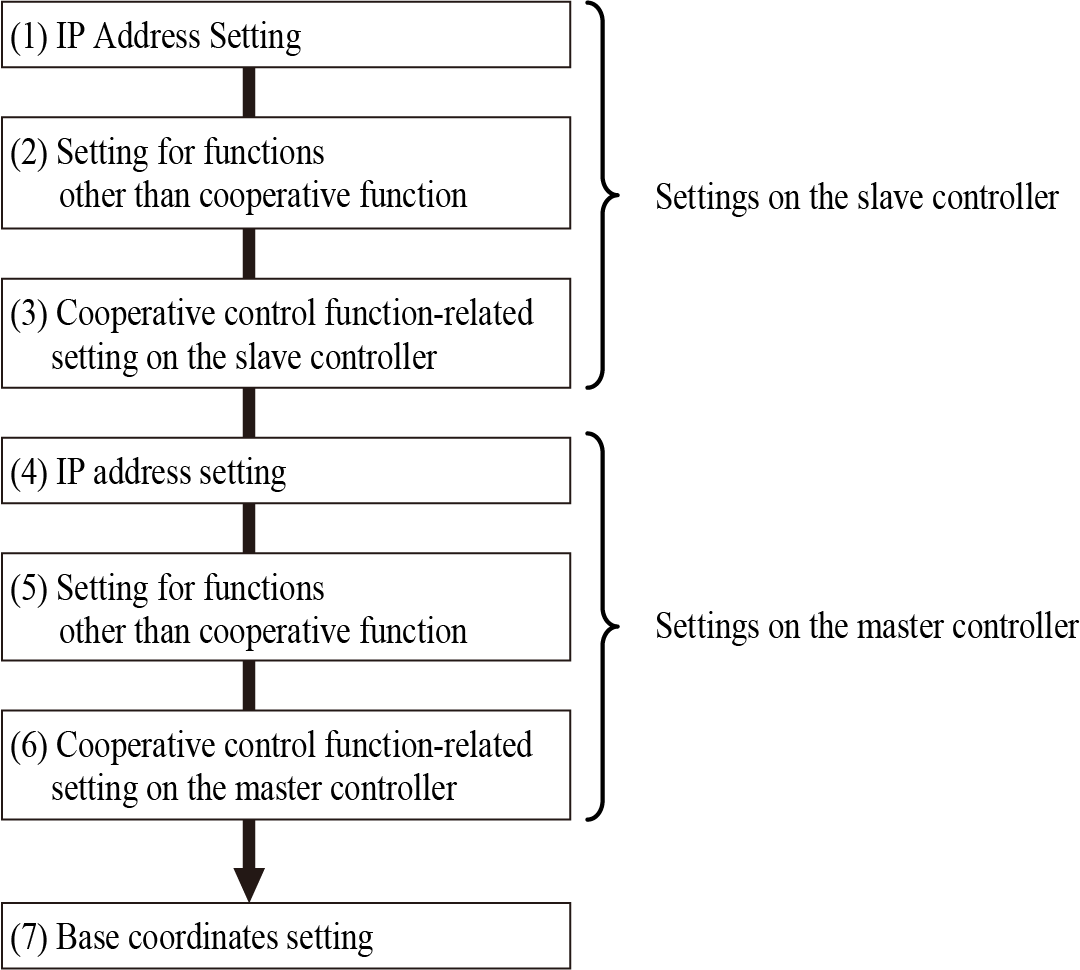
Settings on the Slave Controller
Use a teach pendant for setting.
(1) IP Address Setting
Set an IP address of the slave controller.
For details about IP address setting, refer to "Displaying and Changing Communication Settings Screen" in "TEACH PENDANT OPERATION GUIDE".
For slave controllers, DHCP is not available to assign IP addresses.
(2) Setting for Functions other than Cooperative Function
To use extended-joint, electric gripper or any other functions in a slave controller together with cooperative function, perform the setting of such functions. Refer to the following links,
- For details about extended-joints setting, refer to "Start-up procedure of the extended-joint (ball screw)" in "EXTENDED-JOINT MANUAL".
- For details about selective extended joints setting, refer to "Parameter Setting" in "SELECTIVE EXTENDED JOINT (EtherCAT) MANUAL".
- For details about electric gripper setting, refer to "How to Use an Electric Gripper in Cooperative Control Function".
- For details about force sensor setting, refer to "How to Use Force Sensor in Cooperative Control Function".
- For the setting procedure when using the exclusive control and the cooperative control together, refer to "Controller Setup for Exclusive Control Using Cooperative Control".
(3) Cooperative Control Function-Related Setting on the Slave Controller
Enter a license necessary for the cooperative control function, and then perform cooperative control function-related settings on the slave controller.
Once the setting has completed, power off the controller, disconnect the teach pendant, and then reboot the controller.
Settings on the Master Controller
(4) IP Address Setting
Set an IP address of the master controller.
Set an IP address of the master controller in the same way as the slave controller.
(5) Setting for Functions other than Cooperative Function
To use extended-joint, electric gripper or any other functions in the master controller together with cooperative function, perform the setting of such functions.
The setting method of each funciton is the same as the slave controller.
(6) Cooperative Control Function-Related Setting on the Master Controller
Enter a license necessary for cooperative control function, perform cooperative control function-related settings on the master controller, and then enter IP address of the slave controller.
(7) Base Coordinates Setting
Set the base coordinates for each robots (a master robot and each slave robot).
ID : 1995