
ID : 2155
Precautions for Use of WINCAPSIII, EMU
Cooperative Control Dual Arm Tool
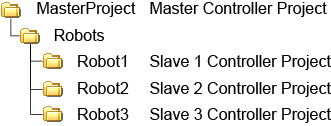
Structure of a Project for Cooperative Control Function
In a project for cooperative control function, slave robot projects are included in the master robot project, as shown below.
Folder names of Robots and the followings are fixed.
Creating a Project for Cooperative Control Function
To create a new project for cooperative control function, in principle, receive necessary data from a controller. If you create a new project based on an existing project, you need to select a project whose IO types and number of variables match with that of the actual robot unit.
Sending a Project for Cooperative Control Function
Coordinate Robot Tool sends whole project at one time. Note that all data, which includes parameters (such as variables, programs, and IO types), will be overwritten by the data to be send.
When You Send or Receive Specific Data
If you intend to send or receive specific data, such as variables or programs, use WINCAPSIII.
WINCAPSIII
Opening a Project of a Slave Robot
To open a slave robot project with WINCAPSIII, from a project for cooperative control function, select a slave robot project file (wpj.) that is in the "Robots\Robot*" folder or lower.
Restrictions on a Slave Robot
If a slave robot is selected, following functions will be disabled.
- [Connect] - [Monitor Communication] - [Online(Monitor/Debug)]
- [Debug] - [Simulation mode]
- Arm operation
Monitoring of Slave Robots
Use EMU for monitoring of slave robots.
EMU
Adding a Slave Robot
Any projects created for a slave robot cannot be added to EMU alone. To simulate a cooperative control function system, add a master robot stored in the cooperative control function project. The slave robots included in the project will be automatically imported as well.
Projects Whose Robots Have Moved
Any projects whose robots have moved with WINCAPSIII ([Arm Modeling] - [Move Robot Data]) cannot be used in EMU.
IO Link Function
The IO link function is not supported in the slave robot.
ID : 2155