
ID : 2216
Visual Function
Overview
The visual function provides image data recorded by a camera and workpiece's geometrical information extracted from these image data to robots. This function allows to figure out the robot motion destination position based on the workpiece's tilt and position information as well as to inspect workpieces based on the image data obtained.
The visual function is available for various applications, such as workpiece inspection, conveyor tracking, and bin picking.
The visual function is divided to two types: External Visual Device and Built-in Vision.
External visual device requires a visual processing dedicated controller that processes image data only.
Built-in Vision processes obtained image data using a robot controller, therefore such a dedicated controller is not required.
For the visual function, dedicated commands written in PacScript are provided.
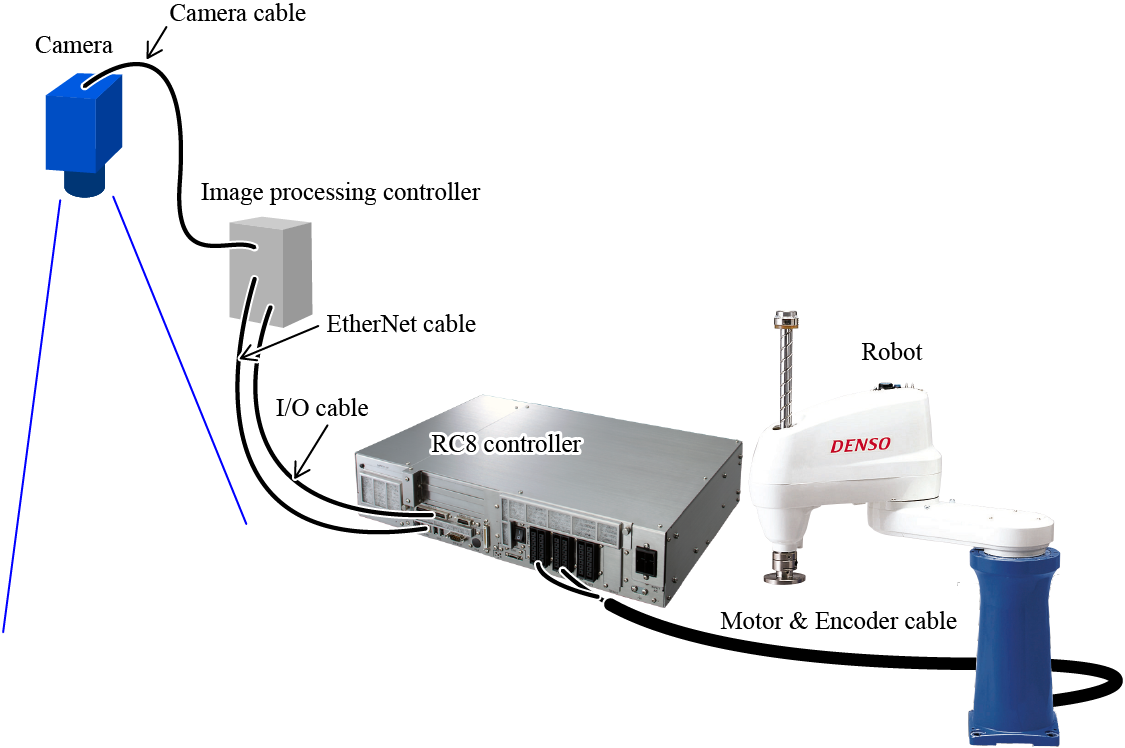
External Visual Device Cmposition
Connect a camera to an image processing controller first, and then connect the controller to a robot controller.
For about available image processing controllers, please refer to "External Visual Device Guide".
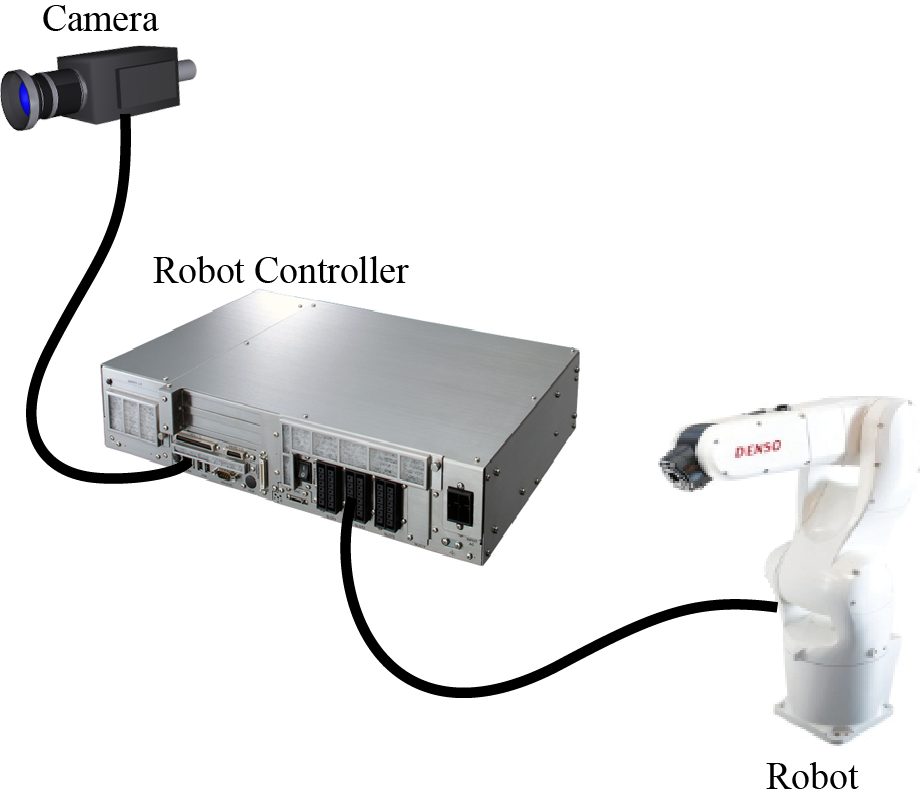
Built-in Vision Composition
Connect a camera to a robot controller directly. This function is available from Ver.1.7.* or later.
For about available cameras, please refer to "Built-in Vision Guide".
Details
For details about external visual device, refer to the "EXTERNAL VISUAL DEVICE GUIDE".
For details about Built-in Vision, refer to the "BUILT-IN VISION GUIDE".
ID : 2216