
ID : 2482
Safely-Limited Position (SLP)
Function
This function monitors if each axis does not exceed the software limit.
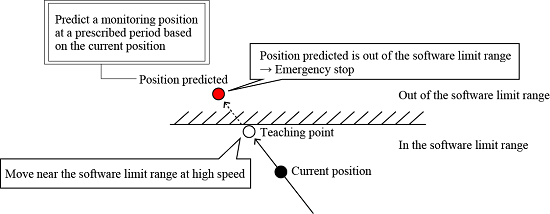
Based on the encoder value of each axis, this function calculates the maximum stop position (for sliding axis) or maximum stop angle (for rotary axis) and evaluates the calculated value is within the the software limit. If this value exceeds the software limit, SS1 function is activated. The robot starts deceleration to stop and then the motor power is turned off.
Use Conditions
| Input signal | Monitoring Disable input |
|---|---|
| Output signal | SLP output |
| Monitoring target | Each robot axis, Extended-joint (Note 1) |
| Monitoring area setting | Within the angle or position range of respective monitoring target axis |
| Reaction time | 50 ms (Max) |
| Process Safety Time (PST) | 100 ms |
| Operation mode | Auto mode, Manual mode |
| Timing to start the function |
|
Note 1 : As a default, all axes including extended-joints are enabled. If you set enable/disable on individual axes, the safety parameter [66 : SLP Setting] needs to be changed. For details, refer to "Safety."
Note 2 : To use Monitoring disable input, the safety parameter [15 : Monitoring disable input setting] needs to be [1: enabled]. For details, refer to "Monitoring Disable Input".
Attention
If being operated in high-speed motion near Software Motion Limits, an error may occur.
If an error occurs, the following shows the ways of avoiding errors.
- Deviate the teaching point to the software limit range.
- Reduce the speed when passing by the teaching point.
ID : 2482