
ID : 2483
Robot Speed Monitoring (RSM)
Function
This function monitors if the speed of monitoring points on the robot is below the specified speed.
Once the speed of a monitoring point exceeds the specified speed, SS1 function is activated. The robot starts deceleration to stop and then the motor power is turned off.
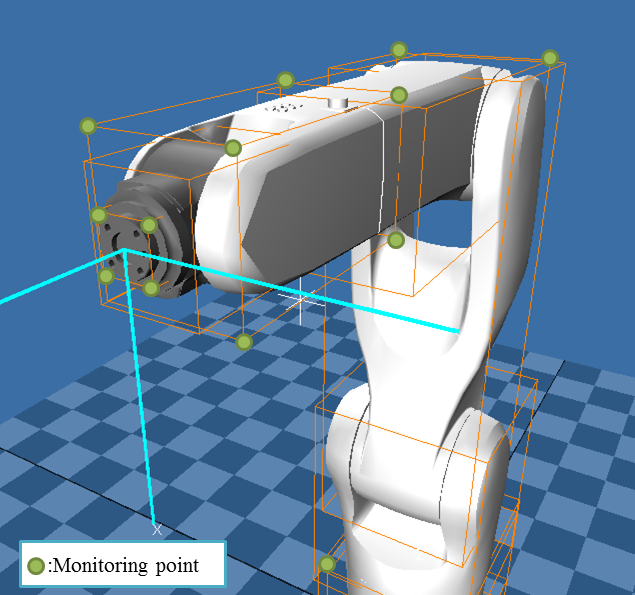
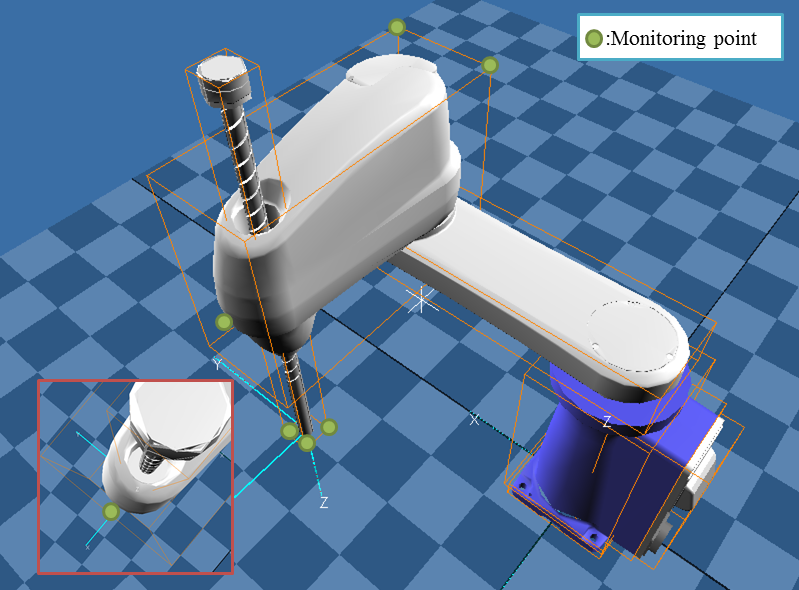
The following figure shows the location of monitoring points.
- The center of flange and TCP
TOOL number specified by the input signal of "Tool number input N" is used. (N represents a number from 0 to 3)
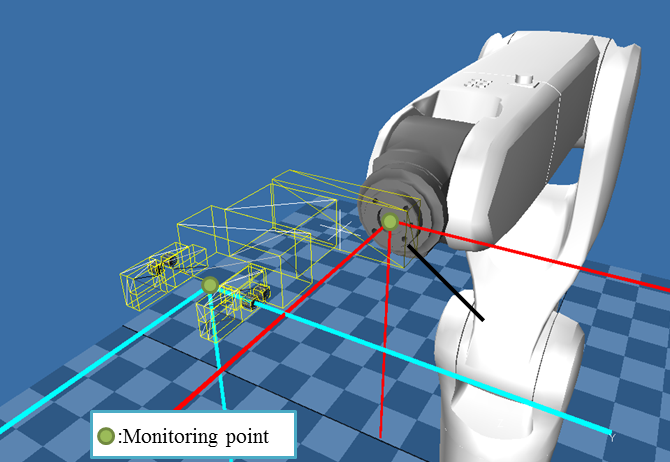
- Points on the robot arm
Use Conditions
| Input signal | RSM N input (effective only in the Auto mode), Monitoring disable input (effective only in the Manual mode), Tool number input N |
|---|---|
| Output signal | RSM N output |
| Monitoring target | Robot, Extended-joint |
| Monitoring area setting | none |
| Reaction time | 50 ms (Max) |
| Process Safety Time (PST) | 100 ms |
| Operation mode | Auto mode, Manual mode |
| Timing to start the function |
|
Note 1 : To use Monitoring disable input, the safety parameter [15 : Monitoring disable input setting] needs to be [1: enabled]. For details, refer to "Monitoring Disable Input".
How to Use
Specifying the Monitoring Speed
Under the Auto mode, the monitoring speed is determined by the Motion I/O input described in the following table.
If two or more signals are turned OFF, the lowest speed setting value among the "turned-OFF" signals is selected.
| Signal name | Description |
|---|---|
| RSM 1 input | Set the monitoring speed to 125 mm/s. |
| RSM 2 input | Set the monitoring speed to 250 mm/s. |
| RSM 3 input | Set the monitoring speed to 500 mm/s. |
Specifying the Tool Number
Specify a Tool number with "Tool number input 0" to "Tool number input 3" of the Motion I/O input. Each Tool number input represents one bit of binary data. One Tool number consists of four bits.
Example : To specify TOOL1, turn ON the “Tool number input 0” and turn OFF the rest of Tool number inputs.
Setting the Link Information
The RC8 series robot controller always monitors the motion speed of the robot joints being driven and limits it to a maximum of 250 mm/sec in Manual or Teach check mode.
If the link information is set up between robot joints and extended-joint(s), the controller can always monitor and limit the total motion speed of the linked joints to a maximum of 250 mm/sec.
For details, refer to "Setting the Link Info".
Case 1: Robot and Each Extended-joint are Independent
Robot and extended-joints are treated as different monitoring target. Extended-joints are monitored based on the link information.
Case 2 : Robot and Extended-joints are Independent, but two or more Extended-joints are Linked
Robot and extended-joints are treated as different monitoring target. For extended-joints, the composite speed of extended-joints are monitored.
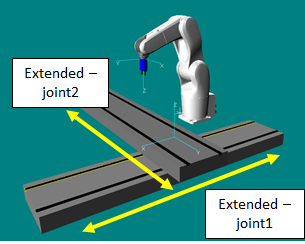
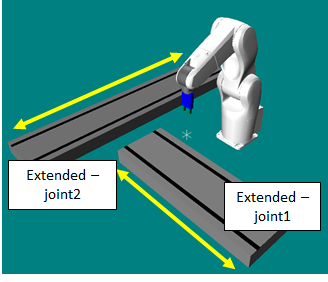
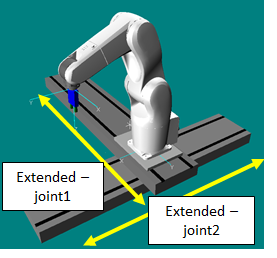
Case 3 : Robot is Mounted on an Extended-joint
The composite speed of an extended-joint and robot at the monitoring point on the robot is monitored.
ID : 2483