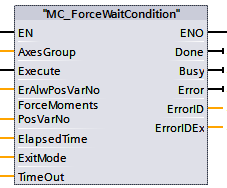
MC_ForceWaitCondition
Wait until the specified conditions of the force control are satisfied.
| Graphic expression |
FB No. |
FB category |
 |
FB2025 |
Motion |
Input parameter
| Parameter name |
Data type |
Valid range |
Default |
Omission (*) |
| AxesGroup |
Integer |
1 or larger |
1 |
No |
- Robot number
- Specify an element number for the variable "Robots[n]" (variable in the data block "DB_DENSO_ROBOTS (DB2990)") mapped to the controlled robot (robot controller).
If a specified value exceeds the valid range, the CPU (PLC) stops.
The maximum valid range value is the maximum element number of the variable "Robots[n]". The default maximum element number is 10 but can be increased or decreased by the user.
|
| Execute |
Boolean |
|
False |
No |
- Execution start
- When the parameter is changed from False to True, this FB is executed.
|
| ErAlwPosVarNo |
Integer |
0 or larger |
-1 |
Yes |
- Travel distance
- Sets the absolute value of travel distance of the tool end from the control start. Unit is millimeter or degree. Spscify the number of a cartesian coordinate system (Position type) settings.
|
| ForceMomentsPosVarNo |
Integer |
0 or larger |
-1 |
Yes |
- Force and moment
- Sets the absolute value of the force and moment converted to the force control coordinate system. Unit is "N" or "Nm". Spscify the number of a cartesian coordinate system (Position type) settings.
|
| ElapsedTime |
Integer |
0 or larger |
-1 |
Yes |
- Elapsed time
- Specify the elapsed time [ms] from the control start. Unit is milliseconds.
|
| ExitMode |
Integer |
0 to 2 |
0 |
Yes |
- Termination mode
- Specify the termination mode (see the table below) of the robot and force control when the condition is met.
[0 : Neither the robot motion nor force control is terminated.]
[1 : The robot immediately stops. (Halt) Force control is not terminated.]
[2 :
Both the robot motion and force control are terminated.]
|
| TimeOut |
Integer |
0 or larger |
-1 |
Yes |
- Timeout
- Specify the timeout period. Unit is milliseconds.
|
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output parameter
| Parameter name |
Data type / Description |
| Done |
Boolean |
- Execution completion confirmation
- True : This FB execution is completed.
False : This FB execution is not completed.
|
| Busy |
Boolean |
- Processing status of this FB
- True : Being executed.
False : Not being executed.
|
| Error |
Boolean |
- Error presence
- True : This FB ended abnormally.
False : This FB ended successfully.
|
| ErrorID |
Word |
- Error location
- 2800 (hexadecimal) : The error occurred in the PLC program.
2801 (hexadecimal) : The error occurred in the robot controller.
|
| ErrorIDEx |
DWord |
- Error Code
- This is a number to identify the error description.
For details, refer to "Error code list".
|
Function description
This function is exclusive to the Compliance Function with Force Sensor.
Attention
To execute this FB, FB with the FB category "Motion" needs to be made executable.
To make FB with the FB category "Motion" executable, use the FB "MC_Power".
