
ID : 3210
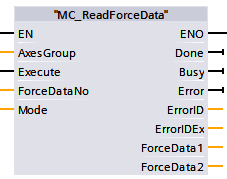
MC_ReadForceData
Obtain the force control data.
| Graphic expression | FB No. | FB category |
|---|---|---|
 |
FB2131 | Non motion |
Input parameter
| Parameter name | Data type | Valid range | Default | Omission (*) |
|---|---|---|---|---|
| AxesGroup | Integer | 1 or larger | 1 | No |
|
||||
| Execute | Boolean |
|
False | No |
|
||||
| ForceDataNo | Integer | 0 to 15 | 1 | No |
|
||||
| Mode | Integer | -1, 0 | 0 | No |
|
||||
(*) : For some parameters, entries can be omitted.
- Yes : Entry can be omitted.
- No : Entry required always.
Output parameter
| Parameter name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
|
| ForceData1 | eRC_Vector |
|
|
| ForceData2 | eRC_Vector |
|
Function description
| ForceDataNo | ForceData1 | ForceData2 |
|---|---|---|
| 0 | The sensor value [N] on the control coordinate system | The sensor value [Nm] on the control coordinate system |
| 1 | The sensor output value [pulse/N] | The sensor output value [pulse/Nm] |
| 2 | The positive peak of the force [N] on the force control coordinate system | The positive peak of the moment [Nm] on the force control coordinate system |
| 3 | The negative peak of the force [N] on the force control coordinate system | The negative peak of the moment [Nm] on the force control coordinate system |
| 4 | The travel distance (command value)[mm] of the tool end from the start of the force control on the force control coordinate system | The travel distance (command value)[deg] of the tool end from the start of the force control on the force control coordinate system |
| 5 | The positive peak (command value)[mm] of the tool end's travel distance from the start of the force control on the force control coordinate system | The positive peak (command value)[deg] of the tool end's travel distance from the start of the force control on the force control coordinate system |
| 6 | The negative peaks (command value)[mm] of the tool end's travel distance from the start of the force control on the force control coordinate system | The negative peaks (command value)[deg] of the tool end's travel distance from the start of the force control on the force control coordinate system |
| 7 | The travel distance (current value)[mm] of the tool end from the start of the force control on the force control coordinate system | The travel distance (current value)[deg] of the tool end from the start of the force control on the force control coordinate system |
| 8 | The positive peak (current value)[mm] of the tool end's travel distance from the start of the force control on the force control coordinate system | The positive peak (current value)[deg] of the tool end's travel distance from the start of the force control on the force control coordinate system |
| 9 | The negative peaks (current value)[mm] of the tool end's travel distance from the start of the force control on the force control coordinate system | The negative peaks (current value)[deg] of the tool end's travel distance from the start of the force control on the force control coordinate system |
| 10 | The deviation [mm] between the command value and the force control command value from the start of the force control on the force control coordinate system | The deviation [deg] between the command value and the force control command value from the start of the force control on the force control coordinate system |
| 11 | The positive peak of the deviation [mm] between the command value and the force control command value from the start of the force control on the force control coordinate system | The positive peak of the deviation [deg] between the command value and the force control command value from the start of the force control on the force control coordinate system |
| 12 | The negative peak of the deviation [mm] between the command value and the force control command value from the start of the force control on the force control coordinate system | The negative peak of the deviation [deg] between the command value and the force control command value from the start of the force control on the force control coordinate system |
| 13 | The force [N] of the sensor value | The moment [Nm] of the sensor value |
| 14 | The positive peaks of the force [N] of the sensor value | The positive peaks of the moment [Nm] of the sensor value |
| 15 | The negative peaks of the force [N] of the sensor value | The negative peaks of the moment [Nm] of the sensor value |
Attention
-
ID : 3210