
ID : 4027
Communicating with an External Device
A COBOTTA equips a dedicated communication connector (Mini I/O connector) that is used to start/stop a COBOTTA's motion procedure from an external device and to inform an external device of the COBOTTA state. Also, it equips an Ethernet connector for data sending and receiving.
With a Field network interface module (optional item), COBOTTA can communicate with an external device over a field network. For more details, refer to "I/O (Field Network Interface Module)".
This section describes how to communicate with a COBOTTA through the Mini I/O connector and how to send/receive data through the Ethernet.
You can start a robot program with Programming software as well.
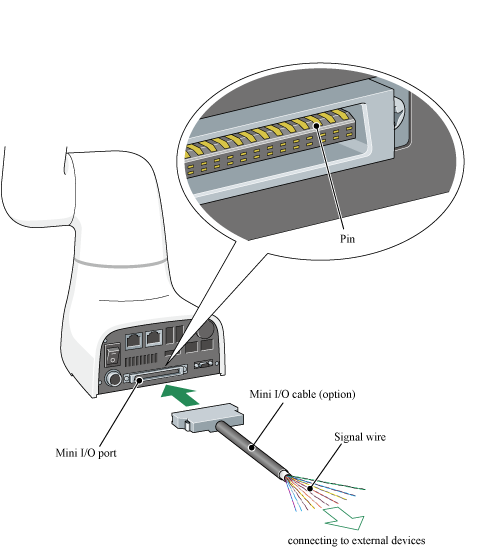
Communicating with a COBOTTA through a Mini I/O Connector
A COBOTTA equips signals to start/stop COBOTTA from an external device (system input signals). It also equips signals to inform an external device of the COBOTTA state (system output signals).
A Mini I/O connector has several pins. For each pin, a system input signal or a system output signal is allocated.
For example, a "Step stop" signal is one of the system input signals. This signal is allocated to the pin number 11 of the Mini I/O connector. If an external device turns off this signal through an I/O cable, a running robot program will stop.
A "Robot running" is one of the system output signals. This signal is allocated to the pin number 46 of the Mini I/O connector. COBOTTA turns on this signal while a robot program is running. By monitoring this signal state, an external device can see whether a COBOTTA is running a robot program.
For details about Mini I/O, refer to "I/O (Mini I/O)".
Mini I/O has signals for safety operation. Refer to Signals for Safety operation.
Sending and Receiving Data through Ethernet
For COBOTTA, there are special commands for data sending/receiving to/from an external device through Ethernet. These command are used in a robot program. Concretely to say, the data to be sent/received in this context are characters (such as numerical values and alphabets).
A COBOTTA moves in different ways depending on a word transferred from an external device. Just like this, if you create a robot program and send it from an external device to a COBOTTA, you can change a COBOTTA motion.
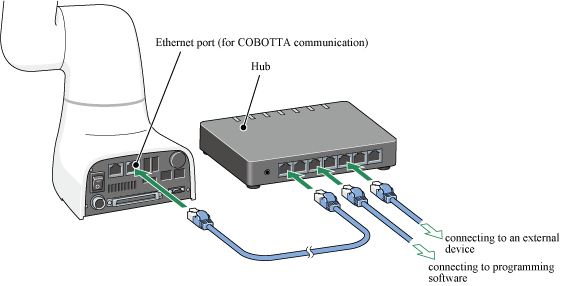
Ethernet connector on a COBOTTA is also used for the communication with programming software. To use both programming software and an external device together, do one of the followings.
- Using a commercially available Ethernet hub (a device to split an Ethernet network), split the network as the figure above shows.
- For details about commands for data sending/receiving, refer to "Data Communication".
ID : 4027