
ID : 4025
Gripping and Recognizing an Object
To grip an object or recognize the position of target object, there are end-effecters (Electric gripper for COBOTTA, Electric vacuum generator, AF camera (N10-W02)) specially designed for a COBOTTA. The following describes the Electric gripper for COBOTTA, Electric vacuum generator and AF camera (N10-W02).
Electric Gripper for COBOTTA
COBOTTA can hold and release an object (work piece) by opening and closing two fingers mounted on the gripper. The distance between fingers can be adjusted along with the size of a work piece to hold. Also, the gripping force can be adjusted.
There are three ways to open/close the fingers.
- To press a gripper plus button or a gripper minus button on the COBOTTA body.
- To use gripper operation window on programming software, such as Cobotta World, Virtual TP, Remote TP.
- To instruct a COBOTTA to open/close the fingers in COBOTTA motion procedures.
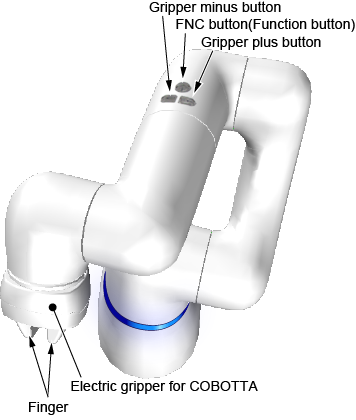
Fingers are removable. COBOTTA can handle various shapes of workpieces by attaching any custom-made fingers. For details on how to remove and attach, refer to "Electric Gripper for COBOTTA".
Refer to "Precautions for using COBOTTA-dedicated end-effecter"as well.
- A device that is attached at the end-effector of COBOTTA (such as an Electric gripper for COBOTTA) is called a "Tool".
Electric Vacuum Generator
Electric vacuum generator holds and releases an object (workpiece) by vacuum and blower operations that is generated by running a pump with a motor. The size of the vacuum pad is adjustable along with the size of a work piece to hold. Also, the vacuum pressure is adjustable.
There are the following three ways to run an electric vacuum generator.
- To press a gripper plus button or a gripper minus button on the COBOTTA body.
- To use gripper operation window on TP App, such as Virtual TP, Remote TP.
- To execute a PacScript-dedicated command.
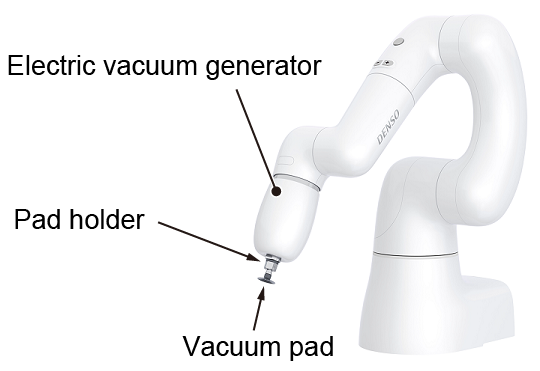
A vacuum pad or a pad holder can be removed. Changing a vacuum pad in accordance with application purpose can handle variety of shapes of workpiece. For information about how to remove or install a vacuum pad and/or a pad holder, refer to "Electric Vacuum Generator for COBOTTA".
Refer to "Precautions for using COBOTTA-dedicated end-effecter" as well.
AF Camera (N10-W02)
COBOTTA can recognize a work piece position by analyzing an image taken by a camera which is installed in the end-effector of COBOTTA. Based on the position information of a recognized work piece, you can move a COBOTTA to the position and instruct COBOTTA to hold an object.

COBOTTA equips a function to recognize a work piece position in an image taken by a camera. However, to use this function in motion procedures ("robot program"), you need to set several items for the image recognition beforehand. The way of the edit of the setting items differ depending on the Programming software.
- Setting with Cobotta World
- To use a setting window for image recognition.
- Setting with other than Cobotta World
- To install EVP (camera image processing software of DENSO) in your computer, and perform the image recognition setting with the software. Once the setting is sent to COBOTTA, you will be able to use the function in COBOTTA.
- EVP is software which is included in RC Vision (robot vision software package of DENSO). This is free-of-charge.
Refer to "Precautions for using COBOTTA-dedicated end-effecter"as well.
- A device that is attached at the end-effector of COBOTTA (such as an AF camera (N10-W02)) is called a "Tool".
- If you use EVP on DENSO robots other than COBOTTA, you need to purchase a license.
- For details about EVP, please refer to "Image Processing Application".
Precautions for Using COBOTTA-dedicated End-effecter
Allowable Mass of Work Piece which COBOTTA can Handle
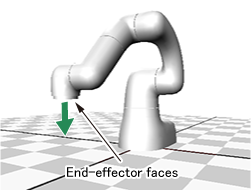
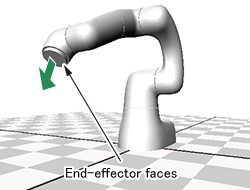
The allowable mass of workpiece which COBOTTA can handle (maximum payload) differs depending on the attitude of COBOTTA during operation. The following shows the maximum payload under the condition that COBOTTA-dedicated end-effecter is not installed.
| Maximum payload | |
|---|---|
When the end-effector faces downward(within ±10°): up to 0.7kg
|
Other than the left figure: up to 0.5kg
|
If a COBOTTA-dedicated end-effecter is installed, the maximum payload will be lowered by the mass of the installed device.
The following shows weight of each device.
| Mass | |
|---|---|
| Electric gripper for COBOTTA | 0.2 kg |
| Electric vacuum generator | 0.31 kg (excluding pad holder) The load capacity of an electric vacuum generator is determined by the diameter of a vacuum pad and vacuum pressure. Refer to "Load capacity of an electric vacuum generator" in the following subsection. |
| AF camera (N10-W02) |
0.15 kg Actual mass is 0.18 kg (including Camera stay for COBOTTA and the COBOTTA end-effector Ethernet cable), however, to figure out the maximum payload, use the mass mentioned above. |
Assuming that a COBOTTA equips an Electric gripper for COBOTTA and the end-effector faces other than downward (±10°). The maximum payload is
| 0.5 - 0.2 = 0.3 kg at the maximum. |
Assuming that a COBOTTA equips an Electric gripper for COBOTTA and an AF camera (N10-W02), and the end-effector faces downward (the angle of end-effector is within±10°). The maximum payload is
| 0.7 - 0.2 - 0.15 = 0.35 kg at the maximum. |
Load Capacity of an Electric Vacuum Generator
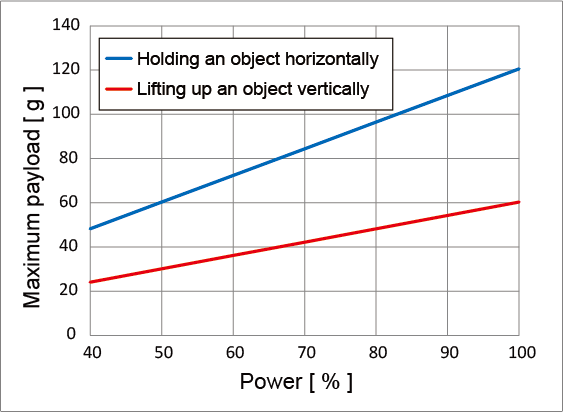
The load capacity of an electric vacuum generator is determined by the diameter of a vacuum pad and vacuum pressure (power)
The following shows the reference graph of the load capacity when the vacuum pad (φ20) is used.
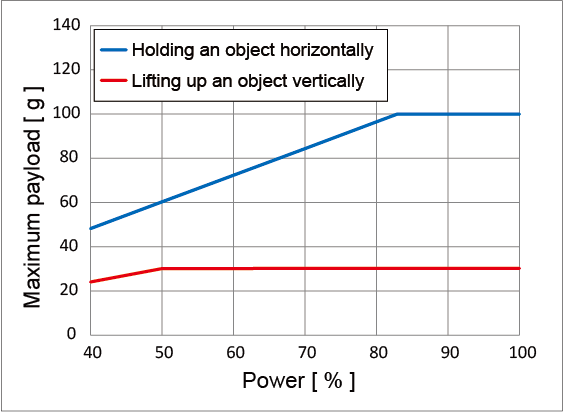
If the AF camera (N10-W02) is mounted, limit the mass of workpiece to 100 [g] or less. Otherwise, the payload may exceed the COBOTTA's load capacity.
The following shows the reference graph of the load capacity when the vacuum pad (φ20) and AF camera (N10-W02) are used together.
If the vacuum operation is running for a long time, the electric vacuum generator may become hot, causing the risk of getting burnt. Avoid continuous vacuum operation for more than five minutes.
The reference graph of the load capacity fully takes the safety ratio into consideration though, if necessary, perform the vacuum test to examine the actual payload.
ID : 4025