
ID : 7259
Creating a Motion Procedure
Creating a COBOTTA's motion procedure (robot program) is called "programming". To create a robot program, use DENSO original programming software. Before starting programming, you need to install programming software in your smart phone or a tablet (smart device) or your computer, and then start programming with the device.
When programming, you will move the COBOTTA's end-effector to a desired position in order to record the motion sequence of the end-effector in COBOTTA. In this process, you can move the end-effector with their hand directly.
The following describes overview of programming software and how to move the COBOTTA's end-effector.
Programming Software
There are four types of programming software for COBOTTA. All software are free of charge.
You will select several software from them for programming.
Types
Cobotta WorldCOBOTTA's main motion, such as Move, Push, and Repeat are provided as icons. To create a program, you will select and combine desired motions from them. You don't need to remember many commands, so you can intuitively create a program. This software runs on Android. For communication with a COBOTTA, you can use a USB. |
 |
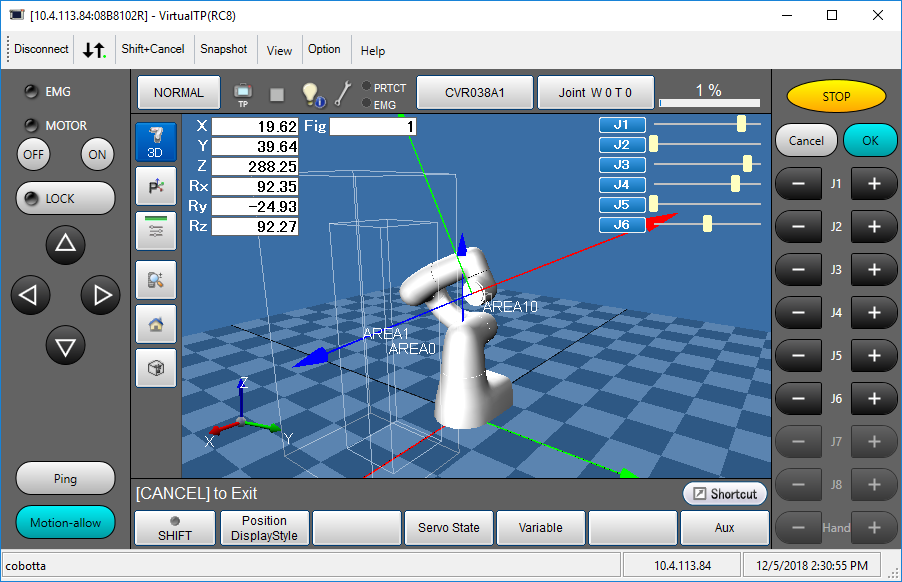
TP AppIn TP App, there are some commands for COBOTTA motion. You will create a program with these commands. Programming language and operation windows are almost same as other DENSO products (Programming language: PacScript, operation window: teach pendant). TP App is classified two types depending on OS where TP App runs. Product names are; for Windows OS, Virtual TP; and for Android OS, Remote TP (Functions and operation method on each software are common to both.). For communication with a COBOTTA, if you use Virtual TP, use Ethernet; If you use Remote TP, use a USB for communication. |
 |
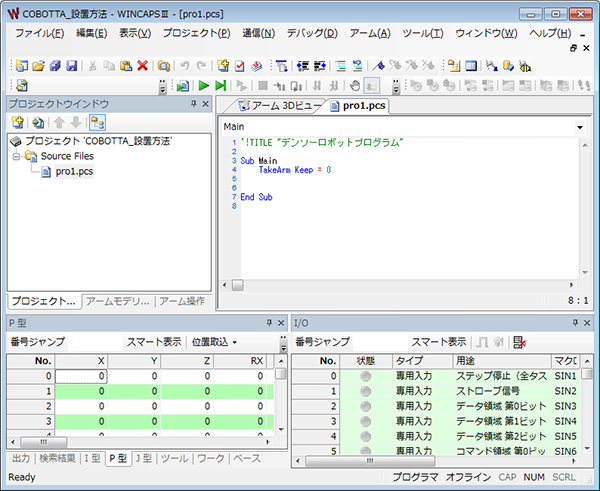
WINCAPSIIIThis is support software for TP App. Programming language is same as TP App though, this software is more easy to edit a robot program and can manage two or more COBOTTA's data. This software is also used in other DENSO robots. This software runs on Windows. WINCAPSIII has been developed to run on a computer. For communication with a COBOTTA, you can use Ethernet. |
 |
COBOTTA Parameter Tool for AndroidThis software cofigures COBOTTA's speed restriction. This software runs on Android. For communication with a COBOTTA, you can use a USB. Note that WINCAPSIII includes COBOTTA parameter tool (for Windows), therefore, once you install WINCAPSIII in your computer, you can use this tool. |
 |
- For details on how to install, refer to "Software Installation".
- If you use Remote TP, Virtual TP, WINCAPSIII on DENSO robots other than COBOTTA, you need to purchase a license.
Combination of Software
Basically, when you create a program, you will use both COBOTTA parameter tool and programming software.
- Using Cobotta World
- If you create a robot program with Cobotta World, any other programming software cannot edit the program. Therefore, the combination of software is only one.
-
Combination of software OS Cobotta World + COBOTTA parameter tool Android - Using TP App
- If you create a robot program with TP App or WINCAPSIII, Cobotta World cannot edit the program. Therefore, to edit the program, you will use software combination, excluding Cobotta World, as the following table shows.
- Since WINCAPSIII includes COBOTTA parameter tool, if you use WINCAPSIII, you don't need to prepare COBOTTA parameter tool separately.
-
Combination of software OS Remote TP + COBOTTA parameter tool Android Virtual TP + WINCAPSIII Windows Remote TP + WINCAPSIII Remote TP : Android
WINCAPSIII : Windows
(You need to prepare two devices.)
Recommended Specifications for Android-supported Tablet
Use a tablet that supports the COBOTTA operation environment.
| Version | 5.0 or higher |
|---|---|
| Display size | 8 inches or larger |
| Communication | SIM- and USB tethering-available tablet. Any tablet that does not meet the above conditions (especially, Wi-Fi model tablet) may not be able to communicate with COBOTTA. |
| Operation checked tablets (*1) |
|
*1 : A tablet that the supported version is not written works normally for any COBOTTA software version.
*2 : If the version of COBOTTA software is older than supported version, there are precautions. Please refer to the following links.
- When using Cobotta World, refer to “Precautions when start-up of COBOTTA takes longer"
- When using TP App or COBOTTA parameter tool for Android, refer to "Precautions when start-up of COBOTTA takes longer"
How to Move a COBOTTA's End-effector
You can directly move a COBOTTA with your hand, however, if you move a COBOTTA with your hands in the Normal mode, it will result in an error. This is because a COBOTTA tries to keep the current figure and position under the Normal mode. To move a COBOTTA directly with your hand, switch the operation mode to the Direct mode or break-released state.
Do one of the followings.
- Setting the operation mode to the direct preparation mode with TP App or Cobotta World, and pressing-down the function button on the arm for 1.5 second or longer will change the operation mode to the Direct mode.
- Under the Normal mode, pressing-down the function button for 1.5 second or longer will release brakes. At the factory default setting, switching to the brake-released state is disabled. With the COBOTTA parameter tool, you can switch enable/disable of this operation.
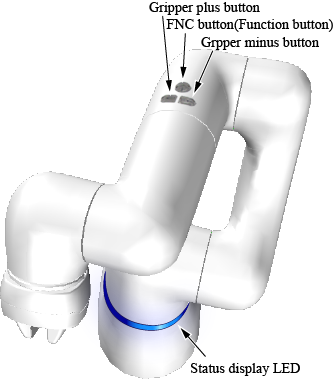
Once the Direct mode is activated, the status display LED lights blue. However, if a COBOTTA approaches to approximate to the motion range limit, the status display LED blinks yellow. In case of an error, it lights yellow or red.
- TP App equips a window to operate a COBOTTA. If you move a COBOTTA with this window, the COBOTTA needs to run in the Normal mode.
- For details on how to switch the operation mode between Direct and Normal with programming software, please refer to "Direct Teaching".
- The color of the status display LED will not change even if brakes are released.
ID : 7259