
ID : 6848
Tool Mode
This section describes the Tool mode in the following subsections.
Concept of the Tool Mode
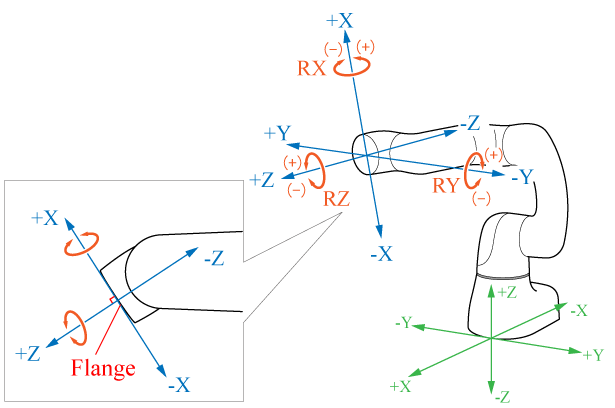
The Tool mode allows user to drive the robot arm in mechanical interface coordinates (whose origin is defined at the center of the flange surface) or in tool coordinates.
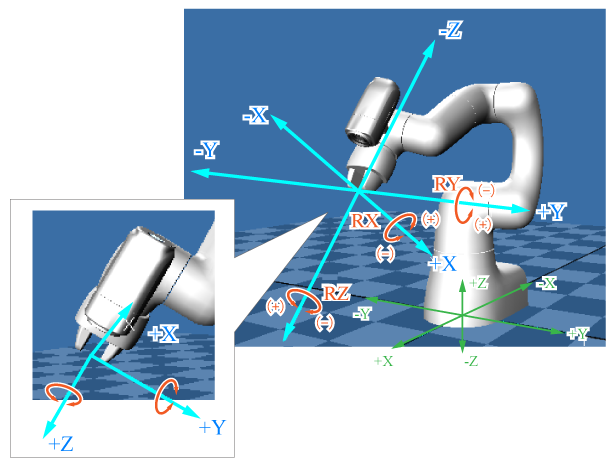
Pressing the X, Y, or Z key in the Tool mode moves the robot flange linearly along the X, Y, or Z axis, respectively, as shown below.
If the RX, RY, or RZ key is used in the Tool mode, the robot arm rotates on each axis of the tool coordinates.
The figure below shows the tool coordinates when TOOL0 is set. These are also called mechanical interface coordinates.
Tool Mode When Using the Electric Gripper for COBOTTA
If the electric gripper for COBOTTA is installed, the origin of the mechanical interface coordinate is determined as a point which exists at the center of two fingers and which exists on the surface through the end of two fingers.
ID : 6848