
ID : 7291
Motion Preparation at Startup
After COBOTTA is powered on, COBOTTA is still not ready to execute a robot program. Motion preparation is required.
To make the robot motion more accurate, CALSET operation should be performed as needed.
Each item can be performed in one of the following three procedures.
| Available item | Operation procedure |
|---|---|
|
1. CALSET(optional) |
|
|
2. Motion Preparation |
This part explains each operation method for items listed below.
- Parameters to be set in advance
- Description of each procedure
- Execution timing of method by I/O command or a robot program
Parameters to Be Set in Advance
When operating with TP App, operation will be performed according to the instructions indicated in the CALSET operation window, which is displayed automatically after powering on the COBOTTA.
When operating in any methods other than using TP App, setting needs to be done so that the window to execute CALSET will not be displayed.
(The above setting is available only from COBOTTA software version 2.6.*.)
The window display setting is performed in the following window by using TP App.
Operation path: [F2 Arm] - [F6 Aux] - [F1 Config]
[Config] window as shown in the figure below will be displayed.
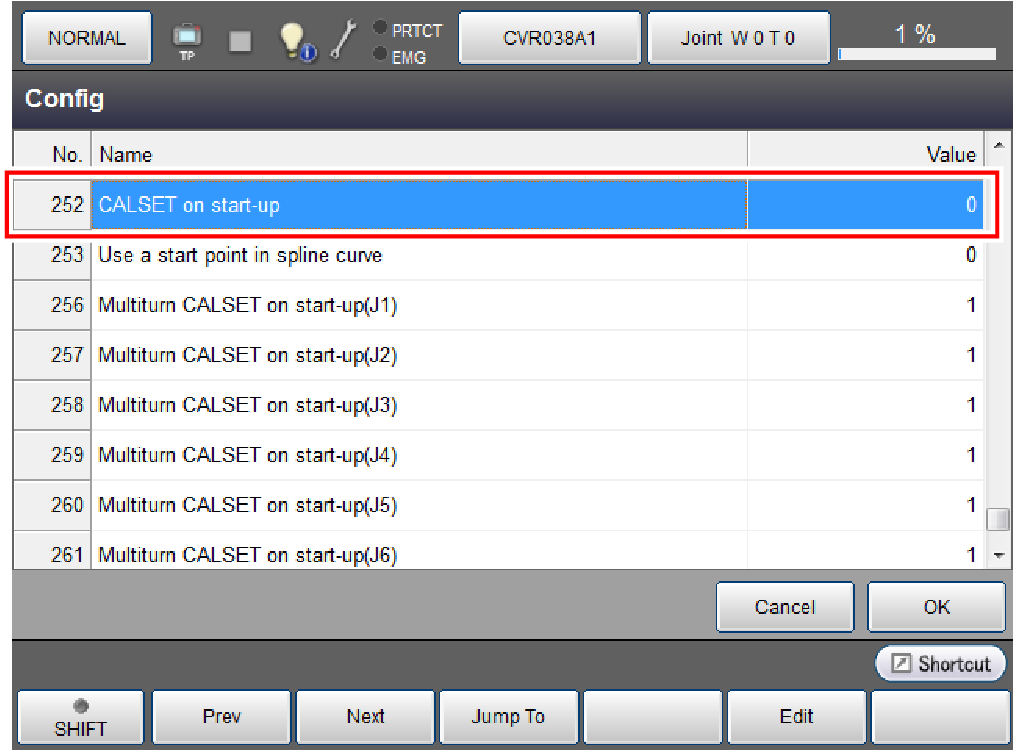
| Setting parameter | Value |
|---|---|
| 252: CALSET on start-up |
Whether or not to display the [CALSET Operation] window at the startup of COBOTTA
|
Set the parameter to "DoNot".
On the contrary, when operating with TP App, set the above parameter to "Do".
Description of Each Procedure
Following three operation procedures are available. Do not use more than one operation procedure at the same time.
For example, when performing CALSET by using TP App, the motion preparation needs to be performed by TP App, not by I/O Command or a robot program.
Operation by TP App
Refer to the following reference.
| Available items | Reference |
|---|---|
| 1. CALSET(optional) |
In CALSET, COBOTTA will be put into motion. For details, refer to "CALSET at Startup". |
| 2. Motion Preparation | Refer to "Motion Preparation". |
Operation by I/O Command
I/O Command differs depending on the usage condition of Field network interface module.
This function is available only from COBOTTA software version 2.6.*.
| Available items | Description |
|---|---|
| 1. CALSET(optional) |
In CALSET, COBOTTA is moved to the CALSET position (mechanical end of each axis). As to the CALSET motion, refer to the TP App window in "CALSET at Startup". CALSET performed by I/O Command or a robot program is called "AutoCal". For I/O Command of "AutoCal", refer to the following links. References of respective usage condition of Field network interface module |
| 2. Motion Preparation |
For I/O Command of "Motion Preparation", refer to the following links. References of respective usage condition of Field network interface module |
- When TP App is connected, the [Motion Preparation] window is displayed on TP App. When the motion preparation is performed by I/O Command, the [Motion Preparation] window of TP App will close automatically.
- When AutoCal is performed after the motion preparation, an error may occur. For details, refer to "Execution Timing of Method by I/O Command or Robot Program" shown below.
- When CALSET is performed, error "0x8420436*: J* You cannot execute CALSET." may occur. If such an error occurs, release the brake, move each axis to the mechanical end, and execute CALSET again.
Operation from a Robot Program
This function is available only from COBOTTA software version 2.6.*.
After powering on COBOTTA, normal task cannot be performed until the motion preparation is complete. Therefore, the following PacScript command should be executed as a "Supervisory Task".
Also, by making the start up setting of supervisory task to be started up at the power-on time, it will be possible to be in the motion preparation status automatically even without TP App. As to the start up setting of supervisory task, refer to "Settings Associated with Start/Stop of Supervisory Task" in "Remote TP/Virtual TP Operation Guide".
| Available items | Description |
|---|---|
| 1. CALSET(optional) |
In CALSET, COBOTTA is moved to the CALSET position (mechanical end of axis) by using a robot program. As to the CALSET motion, refer to the TP App window in "CALSET at Startup". CALSET performed by a robot program or I/O Command is called "AutoCal". To execute AutoCal, "AutoCal" of PacScript command is used. |
| 2. Motion Preparation |
To execute the motion preparation, "MotionPreparation" of PacScript command is used. |
- When TP App is connected, the [Motion Preparation] window is displayed on TP App. When the motion preparation is performed by a robot program, the [Motion Preparation] window of TP App will close automatically.
- When AutoCal is performed after the motion preparation, an error may occur. For details, refer to "Execution Timing of Method by I/O Command or Robot Program" shown below.
- When CALSET is performed, error "0x8420436*: J* You cannot execute CALSET." may occur. If such an error occurs, release the brake, move each axis to the mechanical end, and execute CALSET again.
Execution Timing of Method by I/O Command or Robot Program
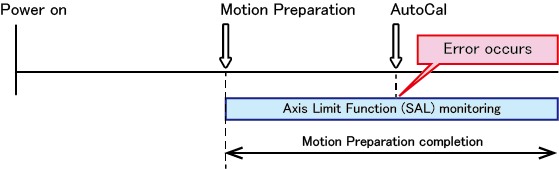
If AutoCAL is performed while the Axis Limit Function (SAL) monitors the axis, an error will occur at the timing of that the robot moves to the limit value of the Axis Limit Function (SAL).
As factory default, the Axis Limit Function (SAL) is disabled. When the function is set to "Enable”, it starts to monitor the axis after the motion preparation.
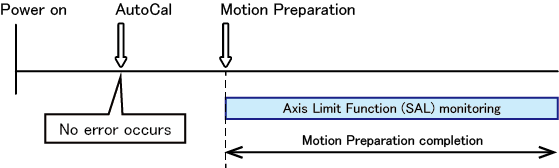
In this case, you can avoid the error occurrence by performing AutoCAL before the motion preparation.
-
Performing AutoCAL after motion preparation
-
Performing AutoCAL before motion preparation
ID : 7291