
ID : 1763
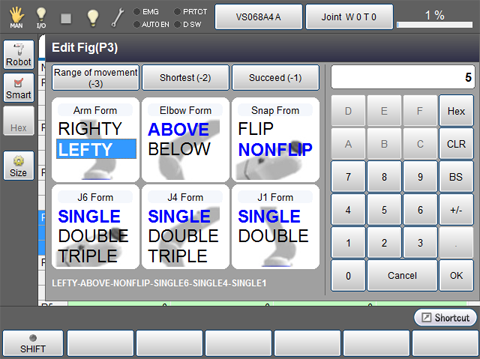
Displaying and Setting the Motion Figure (FIG) of Robot
Operation path : [F3 Variable] - [Select Fig Form (T-type and P-type)] - [F5 Edit]
Set motion figure (FIG) of robot in respective variables of T type and P type.
There are the following five methods to set FIG.
- Setting by selecting individually from "Arm Form", "Elbow Form", "Snap Form", "Joint 6 Form", "Joint 4 Form", and "Joint 1 Form".
- Setting by entering the form number of FIG with numeric keypad to set it.
- Setting by pressing [Range of movement(-3)] to select and use available figure values automatically.
- Setting by pressing [Shortest(-2)] to select and use figure values which achieve the shortest distance automatically.
- Setting by pressing [Succeed (-1)] to use FIG value that was used in the previous move.
| Available keys | |
|---|---|
| [Select FIG Form] |
Set "Arm Form", "Elbow Form", "Snap Form", "Joint 6 Form", "Joint 4 Form", and "Joint 1 Form" individually by directly touching the screen. |
| [Numeric keypad] |
Set FIG from figure number of the FIG. |
| [Range of movement (-3) key] |
Select available figure values automatically. For details, refer to the "Automatic Figure Selection Function (Auto Fig)" of FUNCTION GUIDE. |
| [Shortest (-2) key] |
Select figure values which achieves the shortest distance automatically. For details, refer to the "Automatic Figure Selection Function (Auto Fig)" of FUNCTION GUIDE. |
| [Succeed (-1)] |
Key Set to use FIG value that was used in the previous move. For details, refer to the "Automatic Figure Selection Function (Auto Fig)" of FUNCTION GUIDE. |
ID : 1763