
ID : 2004
Preparation
Before operating the robots with the cooperative motion manually, you need to change the move mode and to specify robot to the reader and the other to the follower.
Changing the Operation Mode
Change the operation mode.
1
Press the Move mode selection button.
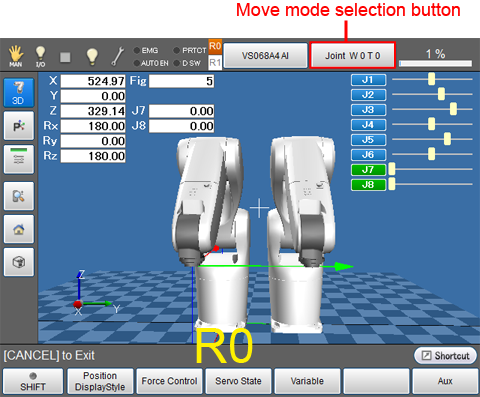
"Choose MoveMode (Robot0)" is displayed.
2
Select move mode. In this example, X-Y is selected.
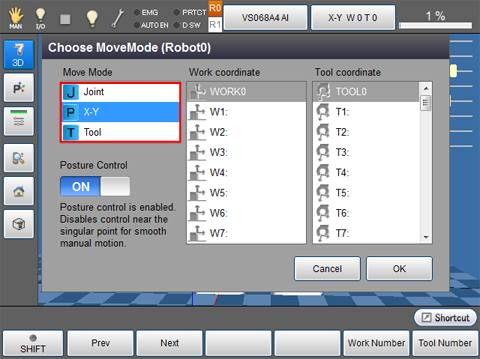
3
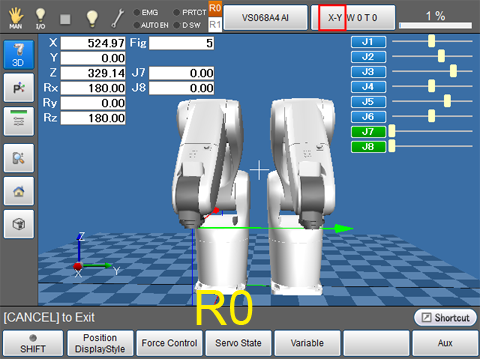
Once [OK] is pressed, move mode will be changed.
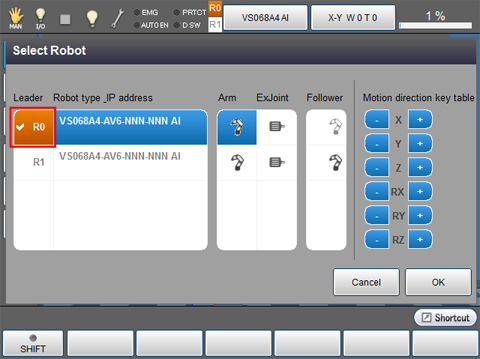
Selecting a Robot
Specify a robot to the leader robot and the other to the follower robot.
In this example, set the arm of Robot0 to the leader, the arm of Robot1 to the follower.
1
Press "Select Robot" button.
"Select Robot" is displayed.
2
Press "R0" on the Leader column, and then select a robot type that you want to set to the Leader.
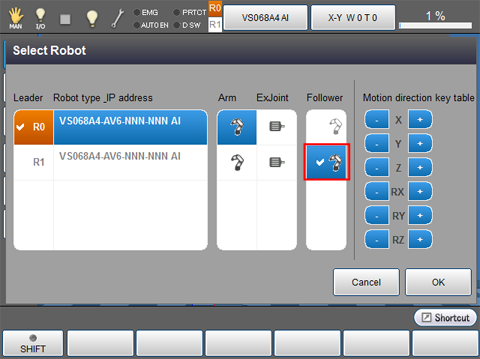
3
Press "R1" on the Leader column to select a robot type that you want to set to the Follower.
4
Pressing "OK" will display the setting that you have made.
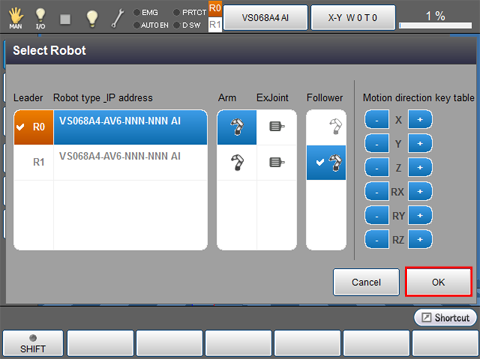
・ Orange : Leader
・ Blue : Follower
・ White : Not selected
ID : 2004