
ID : 2019
Base Coordinate Setting
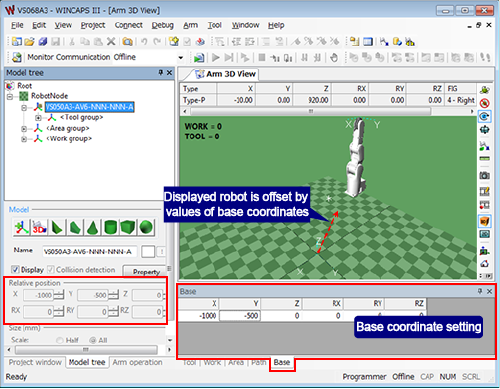
Set the base coordinates as a preparation for setting a world coordinate system.
Base position of currently used robot will be set to the origin of the world coordinate. A new robot base will be the position that is offset from the original base position by the values of base coordinates.
Operation path : [Menu] - [View] - [Arm coordinate] - [Base]
| Other than cooperative control function |
 |
|---|---|
|
Cooperative Control Function |
 |
ID : 2019