
ID : 4931
Outputting a List of Joint Parameter Settings (Using WINCAPSIII)
WINCAPSIII can display a list of joint parameter settings on the PC screen and output it in CSV format.
If you log on to WINCAPSIII as Programmer, you can configure the following parameters in the Joint Setting window.
-
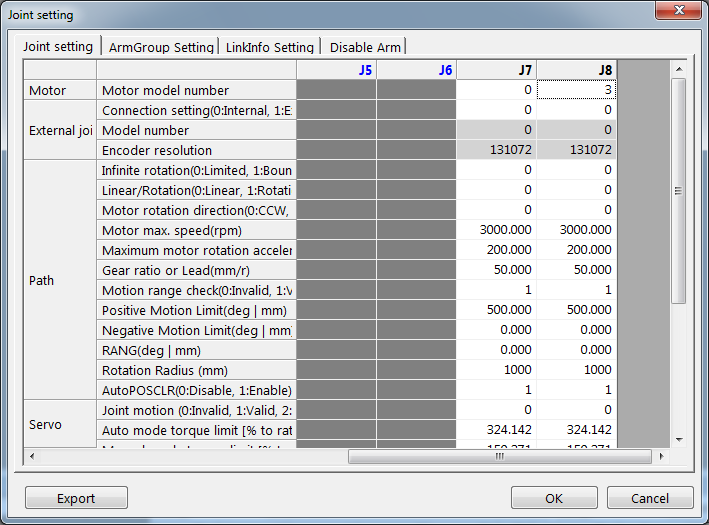
Joint setting table tab
- Motor settings
- Path settings
- Servo settings
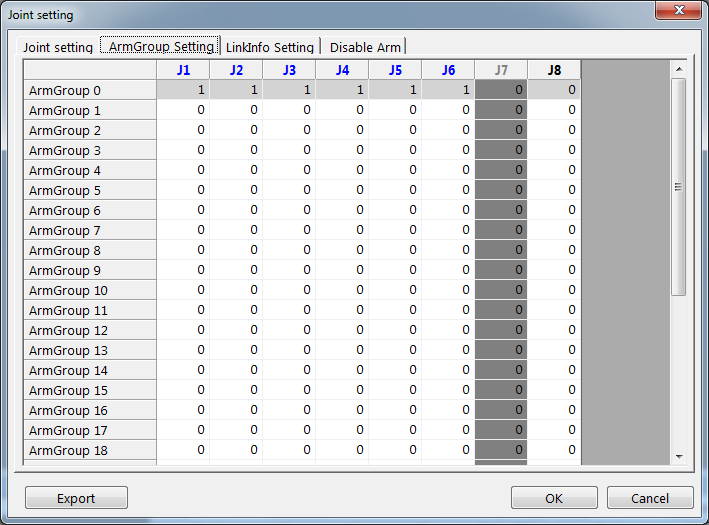
- Arm group tab
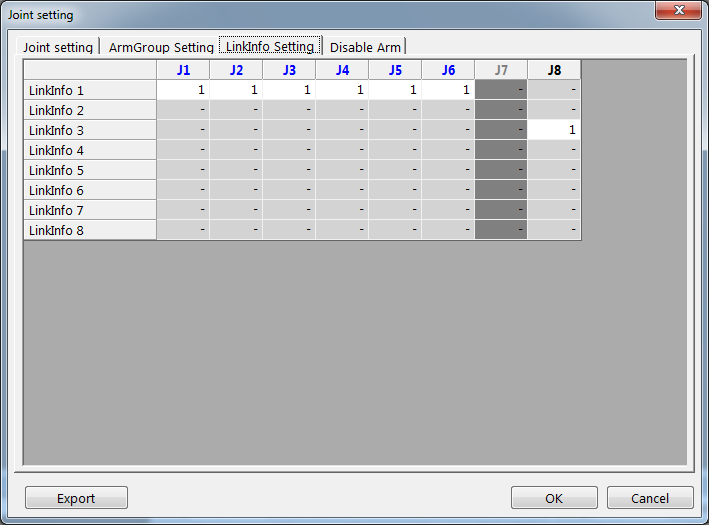
- Link info tab
- Disable arm tab
Calling Up the "Joint setting" Window
Operation path: Project|Joint Setting Table
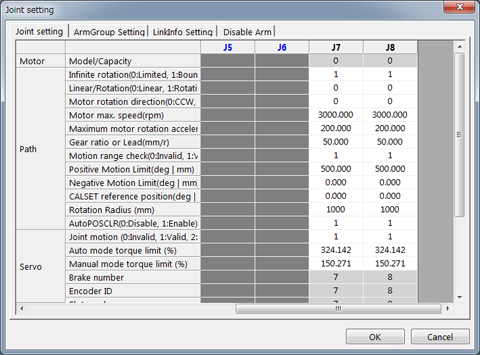
Joint Setting
This tab allows to confirm and check extended-joint-related setting values, such as model number, motion range.
For information about each item, refer to "EXTENDED-JOINT MANUAL".
ArmGroup Setting
This tab allows to set an arm group that is necessary to operate extended-joints in a program.
For information about settings, refer to "Registering Extended-Joints in an Arm Group" in EXTENDED-JOINT MANUAL.
Linklnfo Setting
This tab allows to set an arm group that is necessary to operate robot joints and extended-joints in a program.
For information about settings, refer to "Setting the Link Info" in EXTENDED-JOINT MANUAL.
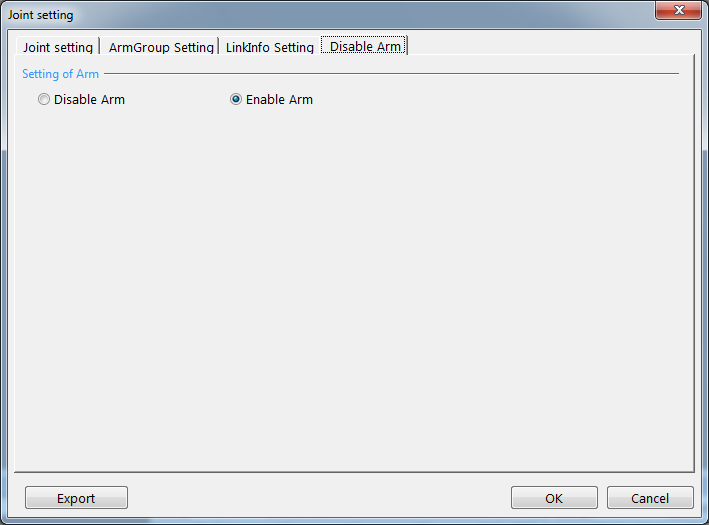
Disable Arm
During the adjustment process of extended-joint, to confirm the robot motion by turning-ON the extended-joints only, select Disable Arm.
For information about settings, refer to "Enabling/Disabling the Robot Arm" in EXTENDED-JOINT MANUAL.
ID : 4931