
ID : 5285
Adjustments
Outline
If you run the program but cannot obtain the results you want, try adjusting the parameters using the [Force Control] monitoring screen example shown below.
- When adjustment, set the Control force and Current limit first.
- You can use a teach pendant and commands for parameter setting though, it is recommended not to use both of them at the same time. Doing so may lead to wrong settings due to confusion.
Adjustment procedure
1
From the top screen, press [F2 Arm] - [F2 Force Control].
On the [Force Control] monitoring screen that appears, check the results, and determine which parameters to adjust.

For details on items displayed on the [Force Control] monitoring screen, refer to the table below.
| Item Name | Details |
|---|---|
| "Controlling force" | Displays the amount of force used to control the robot (external forced applied + force required to control the robot without any external force applied) based on the encoder values. Values are displayed by position and posture. |
| "Deflection" | Current position and deviation from target position of each axis are shown graphically. |
| [Clear peak] | Clears peak values shown under "Estimated force" and "Deflection." |
For each graph, left and right end positions indicate the minimum and maximum values, respectively. Values displayed in the center indicate current values.
2
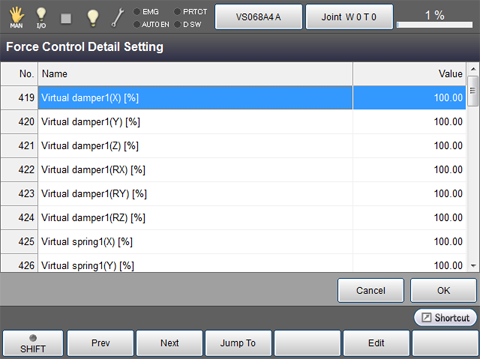
On the [Force Control] monitoring screen, press [F6 Setting] to display the [Force Control Setting] screen, or [F12 Detail setting] to display the [Force Control Detail Setting] screen.
Set the parameters you decided to adjust in Step 1.
3
Run the program once again, to see if you have obtained the required results.
If you still cannot see satisfactory results, repeat Steps 1 and 2 until you obtain the results you want.
ID : 5285