
ID : 5171
Using Compliance Function
Steps on how to use the compliance function are shown below.
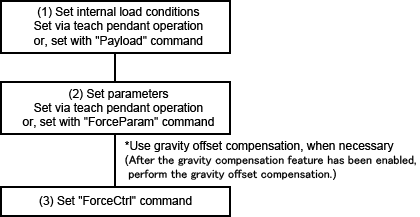
(1) Set internal load conditions
Use method 1 or 2 stated below to set the values for "Mass of payload" and "Payload center of gravity."
- Use the [Config] window of the teach pendant to set values.
- Use the "Payload" command to set values.
(2) Set parameters
Use method 1 or 2 stated below to set parameters.
- Use the teach pendant to set parameters.
- Use the "ForceParam" command to set parameters.
(3) Set "ForceCtrl" command
Use the "ForceCtrl" command to enable/disable the function.
Gravity offset compensation (GrvOffset)
When "ForceCtrl" is executed, the torque at stationary state of the robot and the gravity offset torque are compared, and any error between the two values will be corrected. Executing "ForceCtrl" may generate an error in the compensation value including when an external force such as a contact is applied to the robot. Run the "ForceCtrl" command with no external force exerted on the robot (except for gravity). To enable the force limiting function while any external force is applied, After the gravity compensation has been enabled by "GrvCtrl" command, use the "GrvOffset" command.
ID : 5171