
ID : 7340
MC_ReadAxesGroup
To read robot-related information, such as robot motion status, from a robot controller and save it to a robot variable.
| Graphic expression | AOI category |
|---|---|
 |
Unique |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| InAddress | ARRAY[0..63] of DINT | - | |
|
|||
Input Variable
-
Output Variable
-
Function Description
To read robot-related information, such as robot motion status, from a robot controller and save it to a robot variable (Structured type data: eRC_AxisGroup).
In actual operation, robot controller information is stored in the "Status" variable which is in the robot variable (structured type data: eRC_AxisGroup).
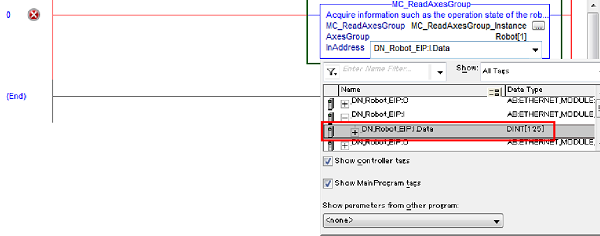
For "InAddress" variable, specify an input tag that has been generated in EtherNet/IP communication setting. (In the following sample, [DN_Robot_EIP:I.Data] is selected.)
For the way of EtherNet/IP communication setting, refer to "Hardware Configurations" of Command-Slave application guide_Rockwell.
Attention
The value of the variable "Status"(*1) updated in this AOI is used to control the robot by other AOI of Command-Slave. If the value of the variable "Status" is old, the robot may not be controlled properly by other AOI of Command-Slave.
Therefore, be sure to place this AOI at the beginning of the program.
*1 : "Status" variable is a variable that is stored in the robot variable (structured type data: eRC_AxisGroup).
ID : 7340