
ID : 3586
Approach
Function
To move to an approach position apart from the reference position by a specified distance.
Syntax
Approach motion interpolation, reference position, approach length[, motion option]
Guaranteed Entry
- Motion interpolation
- Designate a motion interpolation method: "P"/"PTP" for PTP interpolation motion, or "L" for CP interpolation motion.
- Reference position
- Select from Position Type data, Joint Type data and Homogeneous Translation Type data.
- Approach length
- Designate an approach length by single precision real number type data. Target position option can be added to the approach length.
- Motion option
- A motion option can be specified.
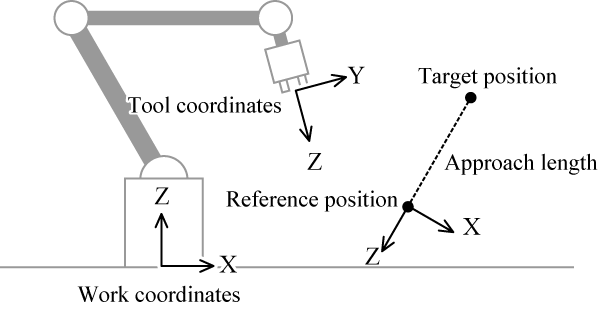
Description
The system moves to a position away from the reference position for a holding position, etc. by the approach length. A point away from the reference position by the approach length in direction toward the tool's -Z coordinate for the reference position.
To execute this statement, the task must acquire robot axis control.
Replacement by Using Move Instruction
Approach instruction can be rewritten as indicated below by using a Move instruction.
Approach P, P3, aaa↓
Move P, DevH(P3, P(0, 0, -aaa))Related Terms
Attention
The figure of a target position is the same as the figure of the reference position.
The target position option is added to the approach length, not to the reference position.
E.g.
Approach P, P[10], @P 40, Speed = 30Example
'!TITLE "<Absolute Motion by Tool Coordinate Designation>"
' Move from the current position to a designated value
Sub Sample_Approach
Dim aaa As Single
Dim bbb As Single
Dim ccc As Position
Dim ddd As Position
TakeArm Keep = 1
' Move to a position 30 mm away from the P( 200, 0, 30, 180, 0, 180, -1 )
coordinate position in the approach direction
Approach P, P( 200, 0, 30, 180, 0, 180, -1 ), 30
aaa = 15.0
bbb = 30.0
ccc = P( 300, -50, 0, 180, 0, 180, -1 )
ddd = P( 150, 100, 0, 180, 0, 180, -1 )
' Move to a position 40 mm away from the ccc coordinate position in the approach direction
Approach P, ccc, 40
' Move to a position aaa (15 mm) away from the ddd coordinate position in the approach
direction at 90% speed
Approach L, ddd, aaa, Speed = 90
' Move to a position bbb (30 mm) away from the ccc coordinate position in the approach
direction at 50% speed
Approach P, ccc, @P bbb, S = 50
End SubID : 3586