
ID : 3595
RotateH
Function
To perform rotation motion with the approach vector as an axis.
Syntax
RotateH rotary angle [, motion option]
Guaranteed Entry
- Rotary angle
- Specify the relative rotary angle (Deg) around the approach vector by Single Precision Real Number Type data.The value range is -180 < rotary angel < 180.
The current attitude is set to 0 degree.
Rotation in clockwise is the positive, and anticlockwise is the negative.
A target position option can be added. - Motion option
- A motion option can be specified.
Description
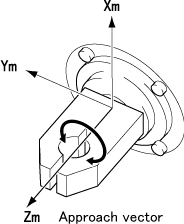
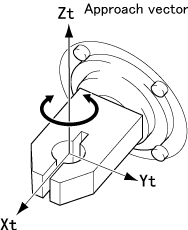
Relative rotation motion is performed with the approach vector as an axis. The direction of the approach vector can be changed freely by specifying the tool coordinate definition as the following figure shows.
To execute this statement, the task must acquire robot axis control.
TOOL0 (mechanical interface coordinates) |
With the Tool definition, change the vector direction and offset the origin. |
Related Terms
Attention
-
Example
'!TITLE "Rotation Motion with Approach Vector as Axis"
' Perform pass motion and rotate the relative rotary angle by 30 degrees after motion instruction
Sub Sample_RotateH
Dim aaa As Position
TakeArm Keep = 1
aaa = P( 200, 0, 30, 180, 0, 180, -1 )
' Move from the current position to the aaa coordinate position
Move P, aaa
' TOOL number 1 is set
ChangeTool 1
' Perform pass motion and rotate the relative rotary angle by 30 degrees
RotateH @P 30
' TOOL number 0 is set
ChangeTool 0
End SubID : 3595