
ID : 2007
Position Acquisition of The Leader Robot
This section shows how to acquire the position of the leader robot into a variable.
1
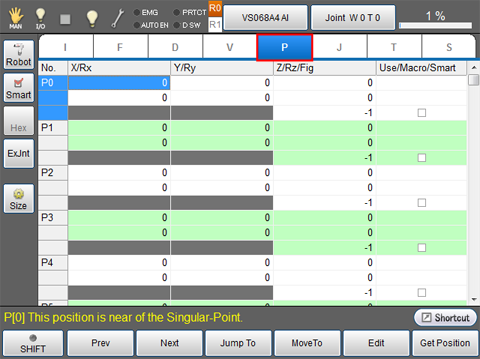
Operation path : Basic screen - [F3 Variable]
On the Variable window, select a variable type. Press "P-variable tab" on the top of the window.
2
Select a variable number you want to store the position of the leader robot, and then press [F6: GetPosition].
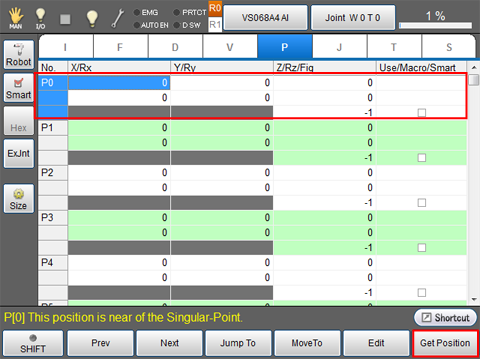
Position acquisition window is displayed.
3
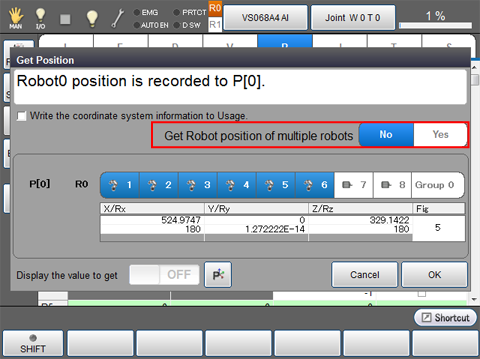
Choose "No" from the selection button on the right side of "Get Robot position of multiple robots".
4
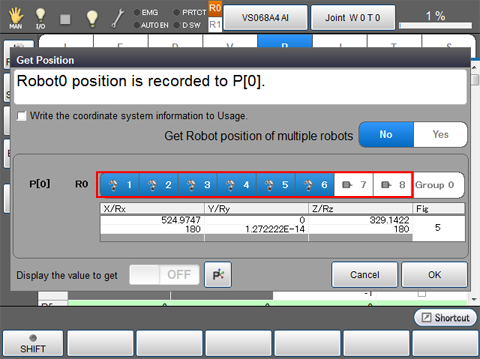
Press any robot axis or extended-joint number on the leader robot.
5
If you want to write the coordinate system information (robot number, work number, and tool number) into the Usage column, select the check box of "Write the coordinate system information to Usage".
press OK.
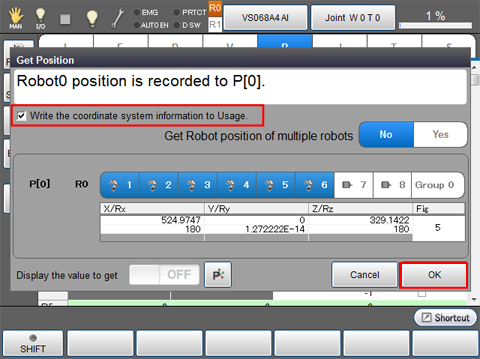
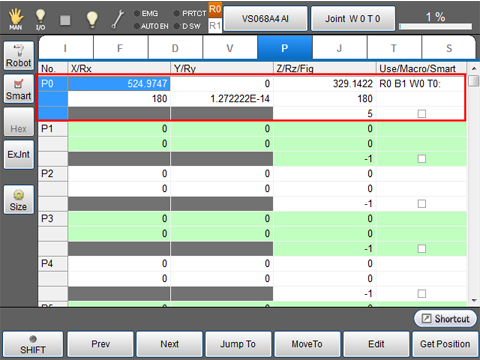
The position of the leader robot has been stored in the P0 variable.
- If you select a check box of "Write the coordinate system information to Usage", the coordinate system information will be written in the Usage column. If any information has been written in the usage column already, the coordinate system information will be overwritten.
- When a controller is rebooted, the check box of "Write the coordinate system information to Usage" remains selected. (Ver.1.13.* or higher)
- To clear the writings on the Usage column, select a column you want to delete the writing, and then press [F5 Edit].
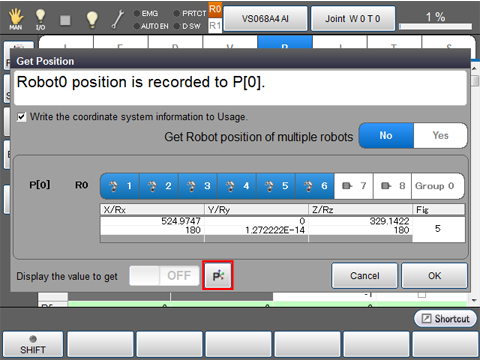
Option Function
On the bottom of the Get Position window, you will find a small square button written in either "P" or "J". Once you press the "P" button, it turns to the "J" button, and conversely. When the button is "J", the position information of extended-joints are displayed.
ID : 2007