
ID : 2010
Moving The Leader Robot by Specifying Variable Number
This section shows how to move the leader robot to the position specified by a variable.
1
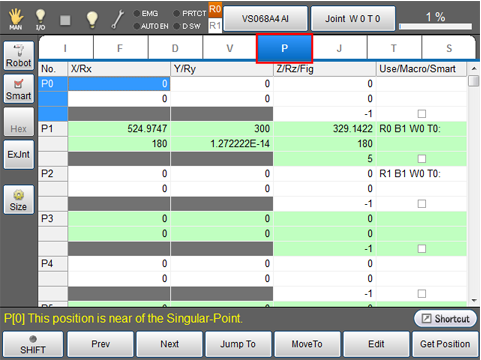
Operation path : Basic screen - [F3 Variable]
On the Variable window, select a variable type. Press "P-variable tab" on the top of the window.
2
Choose a variable that the robot moves to, and then press [F4 MoveTo].
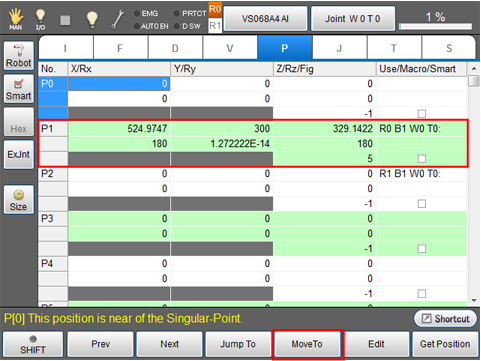
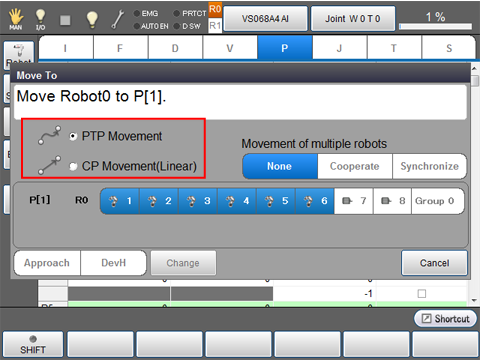
"Move To" window will be displayed. You can move a robot by selecting desired variable on this window.
3
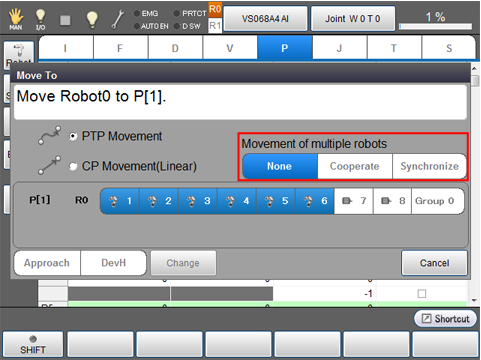
From the selection of "Movement of multiple robots", choose "None".
4
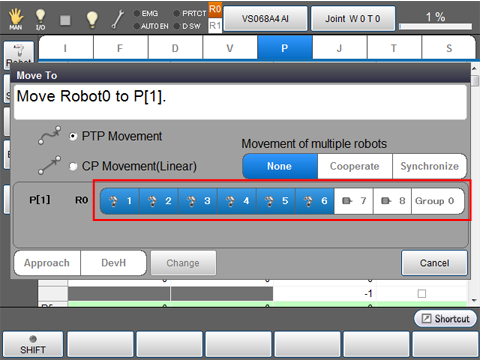
Select robot axis or extended-joint that you want to move.
5
Choose an interpolation method.
6
Press the OK key on the deadman switch of Teach pendant to start robot motion.
Option Function
On the "Move To" window, you can move a robot to given approach position and offset position.
To specify an approach distance, press Approach button. Once a dialog window appears, enter desired approach distance and then press OK. You will see the entered value on the left of the "Change" button.
To specify an offset position, press "DevH" button. Once a dialog window appears, enter coordinate values (X, Y, Z, Rx, Ry, and Rz). The robot will offset by specified distances from the current position. You will see the entered values on the left of the "Change" button.
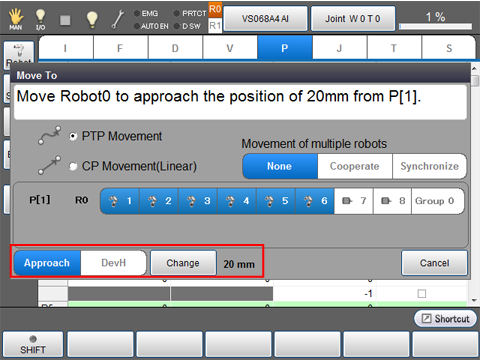
If values of Approach distance or DevH (coordinate values of X, Y, Z, Rx, Ry, and Rx) have been set, you can change these values by pressing [Change] button.
ID : 2010