
ID : 2011
Moving Multiple Robots by Specifying Variable Number
This section shows how to move multiple robots to the respective variable-specified position simultaneously.
Since STEP1 and STEP2 are the same as that of in the "Moving the leader robot by specifying variable number", this section starts from STEP3.
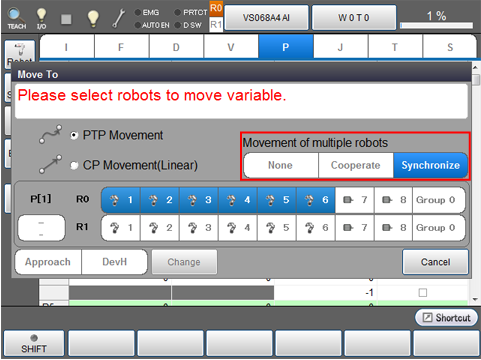
3
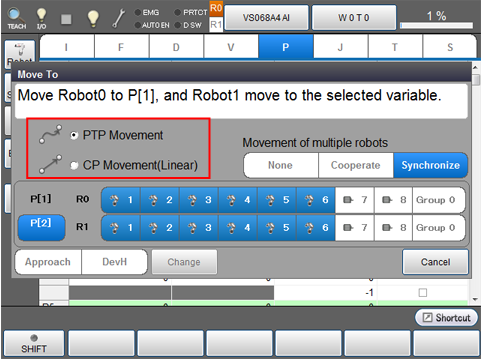
In the "Movement of multiple robots" area, press "Synchronize".
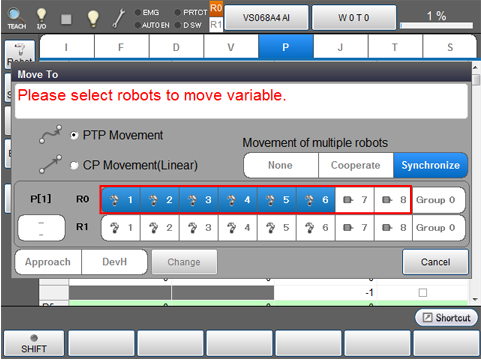
4
Press any robot axis or extended-joint number on the leader robot.
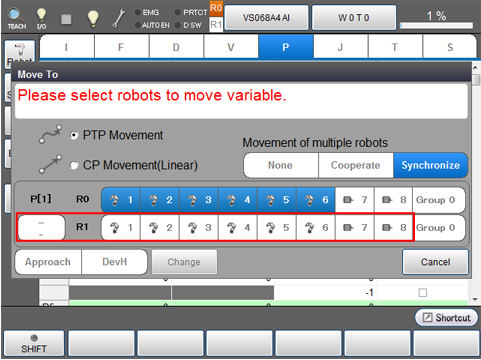
5
Press any robot axis or extended-joint number or a variable number indicator (an empty small square on the leftmost side) on the second robot.
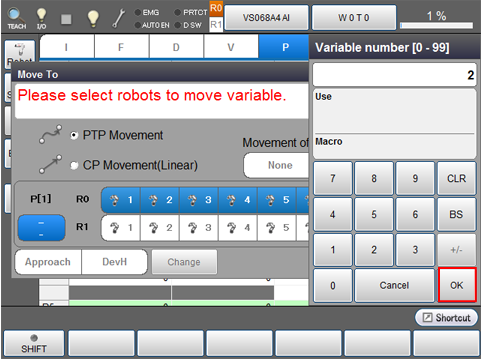
6
Once the numeric keypad is displayed, enter a variable number and then press OK.
7
Choose an interpolation method.
8
Press the OK key on the deadman switch of Teach pendant to start robot motion.
Option Function
When you press "Approach" on the "Move To" window, a dialog box appears. Enter given approach and press OK. All robots will move to the position apart by the specified approach distance.
When you press "DevH", a dialog box appears. Enter given coordinate values (X, Y, Z, Rx, Ry, and Rz) and press OK. All robots will offset by specified distances from the position specified by variable.
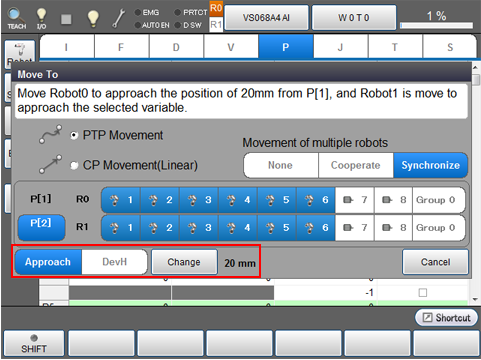
If values of Approach distance or DevH (coordinate values of X, Y, Z, Rx, Ry, and Rx) have been set, you can change these values by pressing [Change] button.
ID : 2011