
ID : 2676
Target Position Check of Robot Task Motion
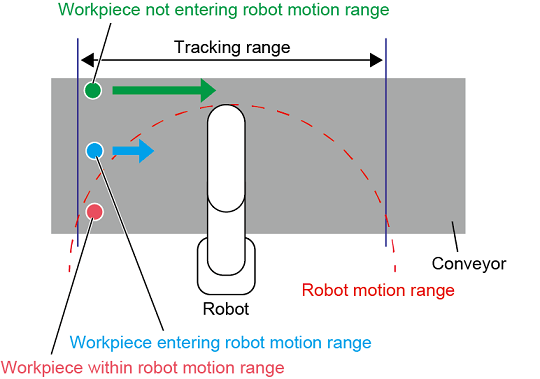
When starting the tracking motion, if the target position of the robot task motion is out of the robot motion range, an error will occur. By using TrackCurMotionRange command, you can check whether the target position of the robot task motion is within the robot motion range.
However, the target position may not enter the robot motion range as shown below.
TrackMotionRange command can check whether there is any point entering the robot motion range, on the path of the target position of the robot task motion when the tracking-target work is within the tracking range.
These commands are available in Ver.2.11.* or higher.
Target Position of Robot Task Motion
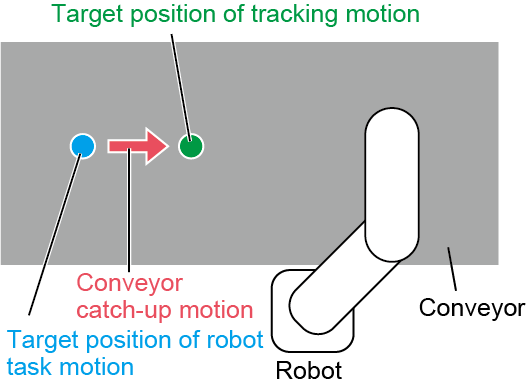
The target position of the robot task motion means "position to pick up the tracking-target work" or "position to place the picked workpiece" that are calculated assuming that the conveyor stops at the start of the tracking motion.
In actual, the conveyor is working, therefore the position synthesized the conveyor catch-up motion from the target position of the robot task motion is the target position of the tracking motion.
ID : 2676