
ID : 2695
I/O Operation Function
This is a function to allocate I/O of the slave robot to the gripper plus/minus button on the arm of COBOTTA, and switch ON/OFF.
If the Mirror Control is used, even though you press the gripper plus/minus button of COBOTTA, COBOTTA’s gripper will not work.
How to Set
1
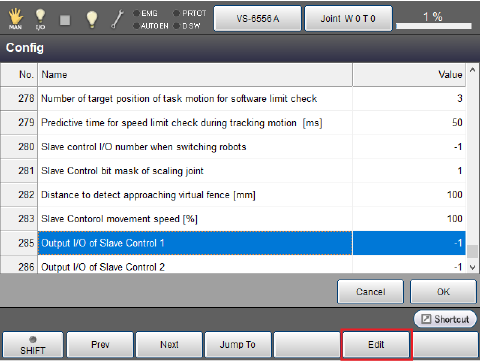
Operation path : [F2 Arm] - [F6 Aux] - [F1 Config]
Select the button to allocate I/O, and press the [Edit] button.
| No. | Parameter name | Default setting | Description |
|---|---|---|---|
| 285 | Output I/O of Slave Control 1 | Disabled | Set the I/O number to switch ON/OFF when pressing the gripper plus button of COBOTTA. If "-1" is set, it is disabled. |
| 286 | Output I/O of Slave Control 2 | Disabled | Set the I/O number to switch ON/OFF when pressing the gripper minus button of COBOTTA. If "-1" is set, it is disabled. |
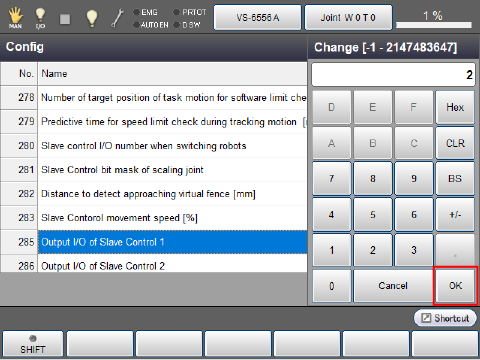
2
Enter the I/O number to set, and press the [OK] button.
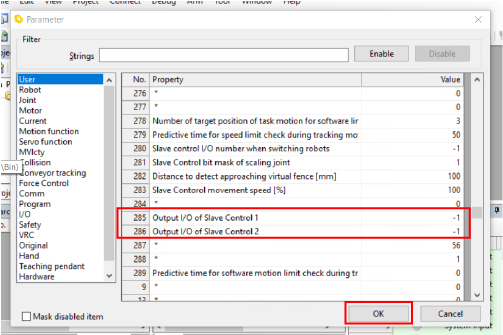
Setting with WINCAPSIII
You can also allocate I/O with WINCAPSIII.
Operation path :[Project]-[Parameter]-[User]
You can change it by changing a value of a parameter and pressing [OK].
ID : 2695