
ID : 3338
Robot Name-Force Sensor Linkage When Using RS-422A Communication Board
When a force sensor is used in the cooperative control function, in some cases, an force sensor which is wired to the robot controller of Robot1 may be attached to the tool end of Robot0, as the following figure shows.
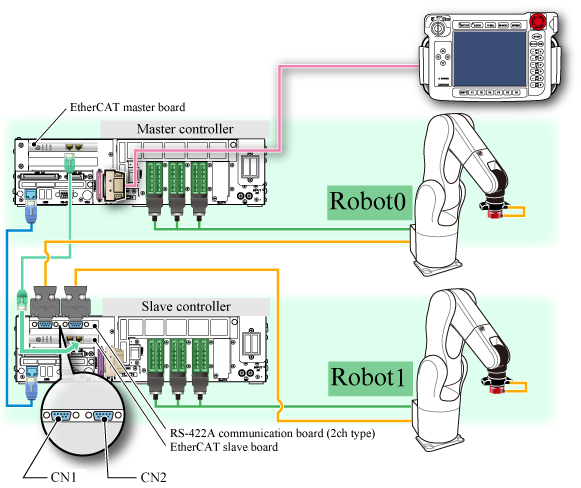
In the figure above, the force sensor of Robot0 is wired to CN1(hereafter, Robot1:RS422A-CN1) of the RS-422A communication board (for 2ch) which is installed in the robot controller of Robot1.
For such application, the force sensor of Robot0 must be linked with Robot1:RS422A-CN1.
The following shows how to link them.
1
Assign Robot0 as a leader.
2
Set the user level to "Maintainer" and then follow the operation path below. [Connection setting] window appears.
| Operation path : [F2 Arm]-[F2 Force Control]-[F5 Sensor]-[F8 Connection setting]-[F5 Edit] |
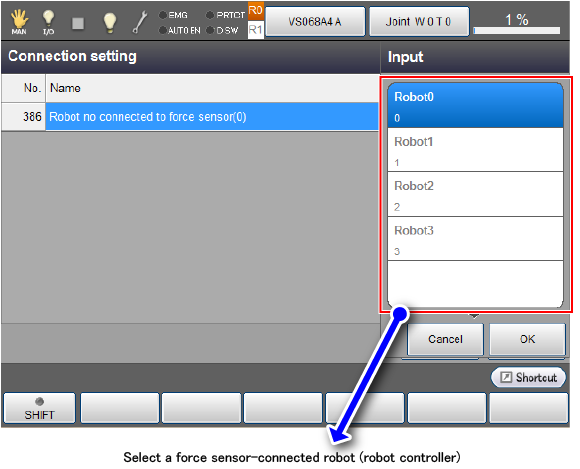
In this window, specify a robot (robot controller) where the force sensor of Robot0 is connected.
In the figure above, since the force sensor of Robot0 is wired to the RS-422A communication board in the robot controller of Robot1, select "Robot1" and then press [OK].
3
Close [Connection setting] window. On the [Sensor] window, press [F1 Sensor Setting]. The following [Sensor Setting] window appears.
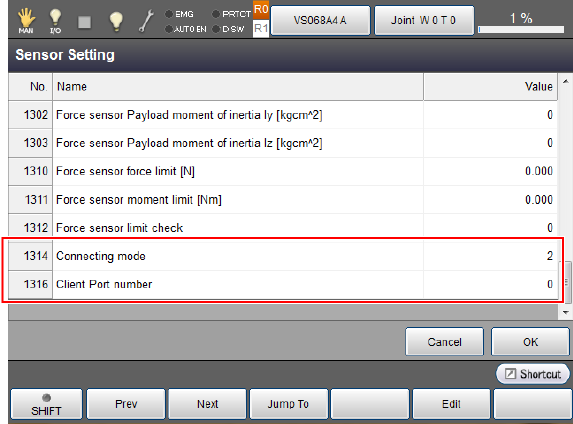
Set the following parameters.
- On the "1314: Connecting mode", select "2: RS422".
- On the "1316: Client Port number", enter COM number of RS-422A communication board which is wired to the force sensor of Robot0.
COM number of RS-422A communication board which is wired to the force sensor of Robot0 can be checked with the following window.
| Operation path : [F6 Setting]-[F5 Comunication and Token]-[F2 Network and Permission] |
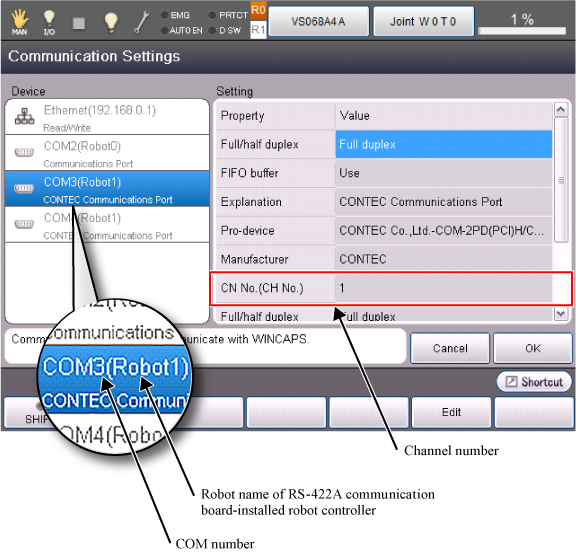
This window displays the communication port information of all robot controllers.
As the force sensor of Robot0 is wired to Robot1: RS-422A_CN1, from the figure above, you will see that the COM number is "3".
This completes the Robot0-force sensor linkage setting.
The robot name-force sensor linkage setting must be done for all force sensors.
Therefore, in this case, do the Robot1-force sensor linkage setting as well.
ID : 3338