
ID : 7384
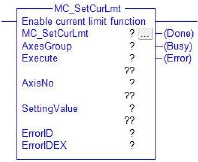
MC_SetCurLmt
Configure the current limiting function and enablse.
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| AxisNo | Integer | 1 to 8 |
|
||
| SettingValue | Real | 0 to 100 |
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
- About Current Limiting Function
- This function sets compliance for individual axes. Limiting the torque of motors for individual axes realizes compliance. Use this function to prevent an excessive force applied to a robot or a work, or to avoid a down due to over load or over current.
Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7384