
ID : 7389
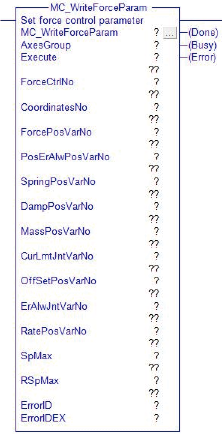
MC_WriteForceParam
To set parameters for force control function (compliance function).
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| ForceCtrlNo | Integer | 1 to 10 |
|
||
| CoordinatesNo | Integer | 0 to 2 |
|
||
| ForcePosVarNo | Integer | 0 or larger |
|
||
| PosErAlwPosVarNo | Integer | 0 or larger |
|
||
| SpringPosVarNo | Integer | 0 or larger |
|
||
| DampPosVarNo | Integer | 0 or larger |
|
||
| MassPosVarNo (*) | Integer | 0 or larger |
|
||
| CurLmtJntVarNo | Integer | 0 or larger |
|
||
| OffSetPosVarNo | Integer | 0 or larger |
|
||
| ErAlwJntVarNo | Integer | 0 or larger |
|
||
| RatePosVarNo (*) | Integer | 0 or larger |
|
||
| SpMax (*) | Real | 0 or larger |
|
||
| RSpMax (*) | Real | 0 or larger |
|
||
* : This function uses only compliance function with force sensor. Not used with the compliance function.
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
-
Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7389