
ID : 7390
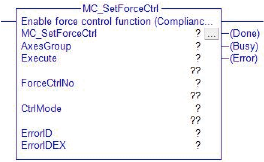
MC_SetForceCtrl
To enable the force control function (Compliance function).
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
| ForceCtrlNo | Integer | 1 to 10 |
|
||
| CtrlMode | Integer | 0,1 |
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
The force control function provides control over the robot's force. The force control function has two types.
| Compliance Function | A function that controls robots' and its accompanied tools' behavior flexibly against external affects. |
|---|---|
| Compliance Function with Force Sensor | A function that controls the pressure applied on the robot's tool end constantly by using the force sensor. |
Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7390