
ID : 7432
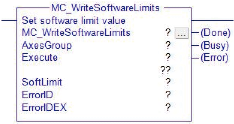
MC_WriteSoftwareLimits
To set the software limit value.
| Graphic expression | AOI category |
|---|---|
 |
Motion |
Input and Output Variable
| Variable name | Data type | Valid range | Conditions for Input and Output |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| SoftLimit | eRC_SWLimits | For input | |
|
|||
Input Variable
| Variable name | Data type | Valid range |
|---|---|---|
| Execute | Boolean |
|
|
||
Output Variable
| Variable name | Data type / Description |
|---|---|
| Done | Boolean |
|
|
| Busy | Boolean |
|
|
| Error | Boolean |
|
|
| ErrorID | Integer |
|
|
| ErrorIDEx | DInt |
|
Function Description
- About Software Motion Limit
-
To avoid damages that could be caused by collision or contact with mechanical stoppers, configure the motion space by setting the software motion limits on individual axes.
By default, the software motion limits are configured slightly inside the mechanical ends.
Attention
To execute this AOI, AOI with the AOI category "Motion" needs to be made executable.
To make AOI with the AOI category "Motion" executable, use the AOI "MC_Power".
ID : 7432