
ID : 1179
Parameter Settings for Force Sensor Robust Compliance Control
The following describes details of parameter settings.
- Specify the parameters for each force control number (parameter table number for the compliance function), and specify the control mode for each force control number as well.
- The force control is configured in three windows: [Force Control Setting], [Force Control Detailed Setting], and [Sensor Setting].
- The ForceParam item names are written in [ ] in the “Item name” column.
- Setting the control force to a larger value will cause the robot to move faster. If the robot collides with a workpiece during the high speed operation, the robot or the force sensor may be broken down or damaged by excessive force. To ensure safety, increase the control ratio gradually from smaller to larger, and set the ratio to 0% for the direction of the force that you do not intend to control.
To prevent unexpected operation of the robot, after switching the force control numbers, make sure that the parameters for the switched control number are specified as intended.
Force Control Setting
Operation path : Top screen - [F2 Arm] - [F2 Force Control] - [F6 Setting]
Select a force control number (parameter table number for the compliance function) from 1 to 10, and then press [OK].
| Item name | Unit | Range | Details |
|---|---|---|---|
| Control mode | - | 0, 1, 3 | Select "3" from the following control modes. 0: Compliance Function 1: Force Sensor Compliance Control 3: Force Sensor Robust Compliance Control |
| Control coordinate [Coordinates] |
- | 0, 1, 2 | Select one of the following coordinate systems. 0: Base coordinates 1: Tool coordinates 2: Work coordinates |
| Control force [force] (X, Y, Z, RX, RY, RZ) |
N | -5000 to 5000 | Determines the force to control the robot. The output force will not be greater than specified. Lowering this value will cause the robot to follow the direction of a smaller external force. Setting this value to 0 will cause the robot to always follow the direction of an external force. |
| Nm | -1000 to 1000 |
Force Control Detailed Setting
Operation path : Top screen - [F2 Arm] - [F2 Force Control] - [F12 Detail setting]
Select a force control number (parameter table number for the compliance function) from 1 to 10, and then press [OK].
| Name | Unit | Range | Details |
|---|---|---|---|
| Position error allowance [PosEralw=allowable position deviation] (X, Y, Z, RX, RY, RZ) |
mm | 0 to 1000 | Determines the allowable positional deviation for the tool end. Force Sensor Robust Compliance Control monitors how much the tool end has moved since the start of force control operation. |
| deg | 0 to 360 | ||
| Joint error allowance [Eralw=allowable axis deviation] (J1 to J8) |
deg | 0 to 1000 | Determines the allowable deviation value for each axis. Force Sensor Robust Compliance Control monitors how much each axis has moved since the start of force control operation. The parameter is invalid if specified for an auxiliary axis. |
| Control rate [Rate=control rate] (X, Y, Z, RX, RY, RZ) |
% | 0 to 100 | Determines the rate of force control applied when Force Sensor Robust Compliance Control is used. Basically, set the ratio to 100% for the direction of the force that you intend to control. Set the rate to 0% for the direction of the force that you do not intend to control. |
| Max speed [SpMax=maximum translation speed] |
mm/s | 0 to 10000 | Determines the maximum speed to be applied until the robot contacts an object. |
| Maximum rotation speed [RSpMax=maximum rotation speed] |
deg/s | 0 to 10000 | Determines the maximum rotational speed to be applied until the robot contacts an object. |
| Stiffness level of the contact object (X, Y, Z) | 0 to 3 | Determines the stiffness level of a contacted object when force is applied to the direction of each axis (X, Y, Z) in the selected coordinate system. 0: Stiffness level 0 1: Stiffness level 1 2: Stiffness level 2 3: Stiffness level 3 Setting a higher stiffness level enables the robot to respond to a stiffer object. In adjusting this parameter, start from the initial value "3". |
|
| Stiffness level of the contact object (Rx, Ry, Rz) | 0 to 1 | Determines the stiffness level of a contacted object when force is applied to the rotational direction of each axis (X, Y, Z) in the selected coordinate system. 0: Stiffness level 0 1: Stiffness level 1 Increasing the stiffness level enables the robot to respond to a stiffer object. In adjusting this parameter, start from the initial value "1". |
Parameter adjustable only with Maintainer
If you log in with Maintainer, you can configure the following parameters in addition to the parameters in the table above.
| Item name | Unit | Range | Details |
|---|---|---|---|
| Opt mode | - | 0, 8 | Not used for Force Sensor Robust Compliance Control. |
Parameter adjustable only in WINCAPSIII
The following parameter can be specified only in WINCAPSIII.
| Item name | Unit | Range | Details |
|---|---|---|---|
| Phase Shift Time (X, Y, Z, RX, RY, RZ) |
sec | 0– |
Not used for Force Sensor Robust Compliance Control. |
Sensor Settings
Operation path : Top screen - [F2 Arm] - [F2 Force Control] - [F5 Sensor] - [F1 Sensor Setting]
If the output values of the force sensor exceed “Contact detect force” or “Contact detect moment”, the force control will start based on the specified “control force”. In this page, assume that the force control starts when the robot is in contact with an object.
| Item name | Unit | Range | Details |
|---|---|---|---|
| Contact detect force for robust compliance control | N | 0– | When the absolute value from the force sensor exceeds this value, the force control starts based on "control force". Set this value to less than "control force". |
| Contact detect moment for robust compliance control | Nm | 0– | When the absolute value from the force sensor exceeds this value, the force control starts based on "control force". Set this value to less than "control force". |
- The robot always performs a compliant motion in the direction for which "control force” is set to 0. Therefore, the robot always operates with the force control working regardless of the parameter values specified in the [Sensor Setting] window.
- Set “contact detect force” and “contact detect moment” to the values equal to or greater than noises of the force sensor. If the parameters are set to the values less than the noises, the function fails to correctly detect a contact with an object.
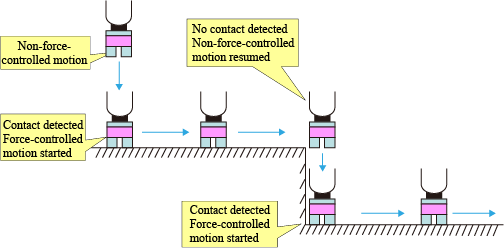
Contact with an object
Activating Force Sensor Robust Compliance Control will cause the robot to perform a non-force-controlled motion until a contact with an object is detected from the output values of the sensor.
The speed of non-force-controlled motion is determined by the following formula based on the specified value of "maximum translation speed" or "maximum rotation speed", and "control rate".
- Non-force-controlled motion speed = (maximum translation speed or maximum rotation speed) × control rate
To change the speed of the robot motion, change the values of "maximum translation speed” or "maximum rotation speed”, and "control rate". These parameters are described in "Force Control Detailed Setting".
ID : 1179