
ID : 1994
Robot-Related Safety Standards Compliance
To comply with ISO10218 (safety-related standard for robots) during operations with cooperative control function, follow the conditions below.
- Use an ISO10218 compatible robot controller for both the master and slave controllers. Wire correctly to safety signals.
For details, refer to the table below.
RC8A/RC8 Specification Compliance with ISO10218 Safety signal wiring method RC8A Standard specification Possible Refer to "Safety Signal Wiring for the RC8A Standard Specification". Safety Motion specification Refer to "Safety Signal Wiring for the RC8A Safety Motion Specification". Safety-IO Less specification Impossible - RC8 Standard specification Possible Refer to "Safety Signal Wiring for the RC8 Standard Specification". Safety-IO Less specification Impossible - - Do not connect a teach pendant to the slave controller.
- Specify robots in motion clearly.
Perform the following two actions to specify robots in motion clearly.
(1) Make robot names assigned to interlocked robots visibly identifiable. When the cooperative control function is used, assign robot names, such as "Robot0" and "Robot1", to interlocked robots. Make them visibly identifiable to understand which robot name indicates which robot.
<Example> Place a label on a robot (Prepare a label by you).
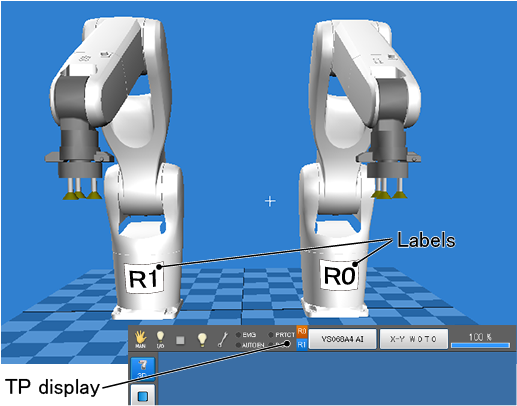
(2) Make it visible whether the robot motor is turned ON. <Example> Turn ON the light using a Mini I/O output signal interlocked with the motor power.

Connect it to both the master and slave controllers.
- RC8A wiring example
In addition to safety signals, connect the wiring shown below to the Mini I/O connector.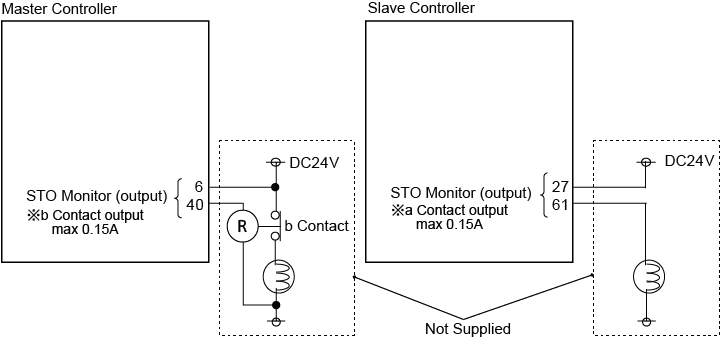
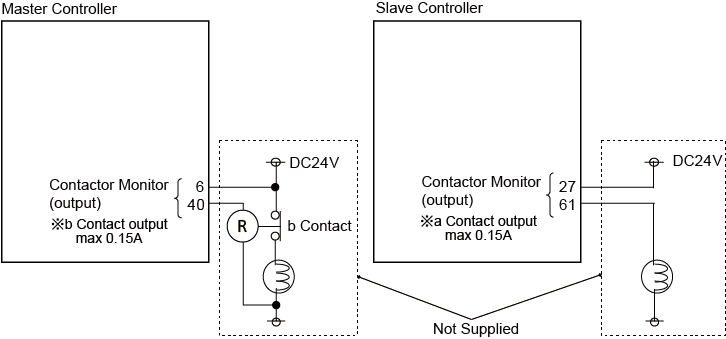
- RC8 wiring example
In addition to safety signals, connect the wiring shown below to the Mini I/O connector.
- RC8A wiring example
ID : 1994