
ID : 3068
Safety Signal Wiring for the RC8A Safety Motion Specification
This section describes how to wire safety signals when the robot controller has the RC8A Safety Motion specification.
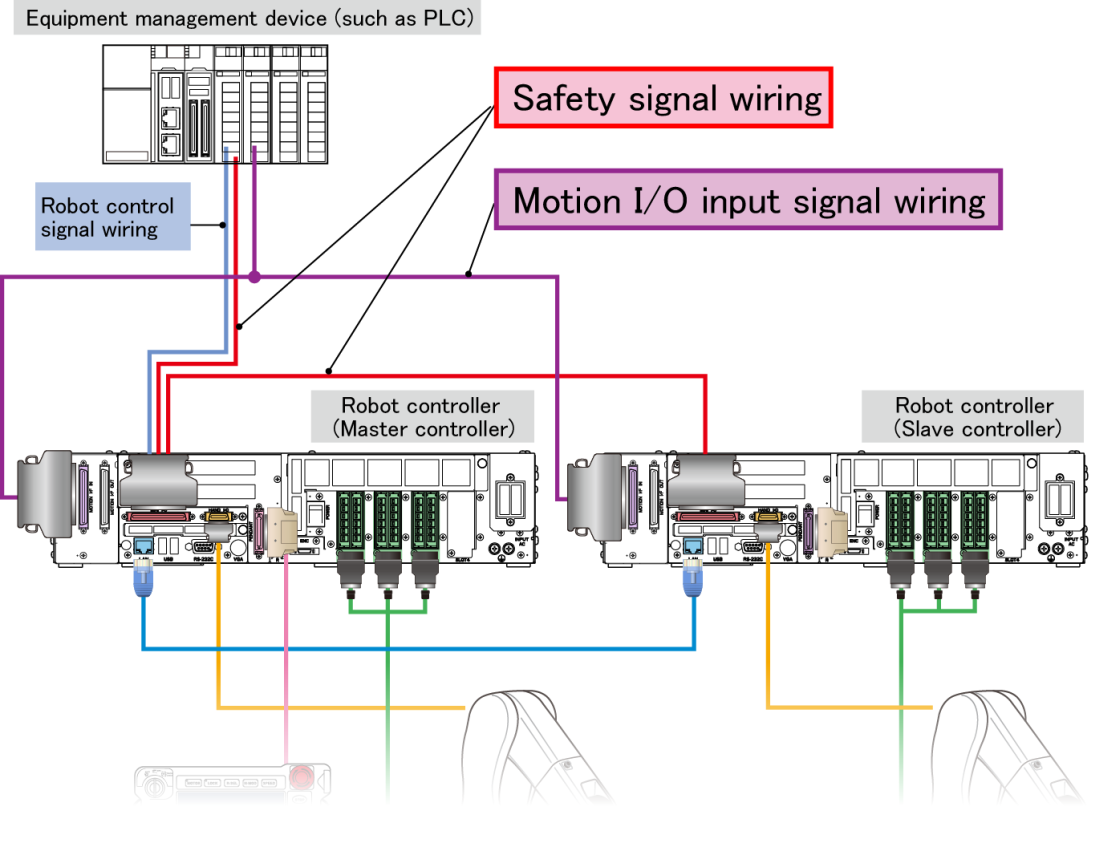
This applies to areas indicating "Safety signal wiring" and "Motion I/O input signal wiring" in the entire system shown below.
Safety Signals to Be Connected
Connect the following signals (all are Mini I/O signals) to both the master and slave controllers.
- External Emergency Stop input
- Protective Stop input
- Enable Auto input
For the master controller, the above signals should be connected from the equipment management device.
Of output signals on the master controller, ones interlocked with the above input signals can be used for the slave controller. For example, when the Enable Auto input is turned ON, the Auto Mode Mutual Monitoring (output) is turned ON accordingly (The teach pendant or mini pendant mode switch needs to be set to "AUTO"). Therefore, the Auto Mode Mutual Monitoring (output) on the master controller can be used as the Enable Auto input signal on the slave controller.
However, the Protective Stop input on the slave controller must be short-circuited.
Of Mini I/O signals on the slave controller, the following signals are inactive.
Do not wire them.
| Signal | Terminal No. |
|---|---|
System I/O signals However, the following signals are excluded.
|
No. 11 to No. 26 and No. 46 to No. 60 |
| User I/O signals |
Safety Signal Wiring Example
When two robots are linked for cooperation, the signal wiring may be simple because the safety signal on the master controller can be directly connected to the slave controller.(Relays are used for some contacts.)
On the other hand, if three or more robots are linked for cooperation, the safety signal of the master controller needs to be distributed to each slave controller with relays.
For about wiring example, refer to the following links.
- Sample wiring diagram for two robots (PDF:190KB)
- Sample wiring diagram for three or more robots (PDF:164KB)
The wiring can be connected to Mini I/O using "I/O cable for Mini I/O" or "Mini I/O connector kit" (both are optional).
Mini I/O connector kit consists of a connector only. Customers need to prepare cables by themselves when selecting this part though, there is also advantage that the master controller's Mini I/O wiring can be easily separated into two devices (an equipment control device and the slave controller).
For the option part numbers and connector pin arrangement, refer to the tables below.
- Option part numbers
-
Part name Part number I/O cable for "Mini I/O" (68 pins) 8 m 410141-270* 15 m 410141-271* Mini I/O connector kit 410159-019*
- Connector pin arrangement
-
Mini I/O type I/O allocation mode Reference NPN Mini I/O dedicated Refer to "[NPN type, Mini I/O dedicated mode] Mini I/O Pin Assignment for RC8A". Other than Mini I/O dedicated Refer to "[NPN type, other than Mini I/O dedicated mode] Mini I/O Pin Assignment for RC8A". PNP Mini I/O dedicated Refer to "[PNP type, Mini I/O dedicated mode] Mini I/O Pin Assignment for RC8A". Other than Mini I/O dedicated Refer to "[PNP type, other than Mini I/O dedicated mode] Mini I/O Pin Assignment for RC8A".
Motion I/O Input Signal Wiring
Wire the Motion I/O input signals so that they can be transmitted to the master and slave controllers simultaneously.
Motion I/O Input Signal Wiring Example
When two robots are linked for cooperation, the signal wiring may be simple.
On the other hand, if three or more robots are linked for cooperation, the safety signal of the Motion I/O needs to be distributed to the master controller and slave controllers with relays.
For about wiring example, refer to the following links.
- Sample wiring diagram for two robots (PDF:150KB)
- Sample wiring diagram for three or more robots (PDF:182KB)
If either SS2 or RSM function is executed during synchronous motion or cooperative motion, an error may occur during or after deceleration.
Use optional "MOTION INPUT cables" to wire the Motion I/O input signals.
The option part numbers and connector pin arrangement are shown below.
- Option part numbers
-
Part name Part number MOTION INPUT cable (68 pins) 8 m 410141-656* 15 m 410141-657*
- Connector pin arrangement
- Refer to "Motion I/O Input Signals Pin Assignment".
ID : 3068