
ID : 2686
Slave Control Setting
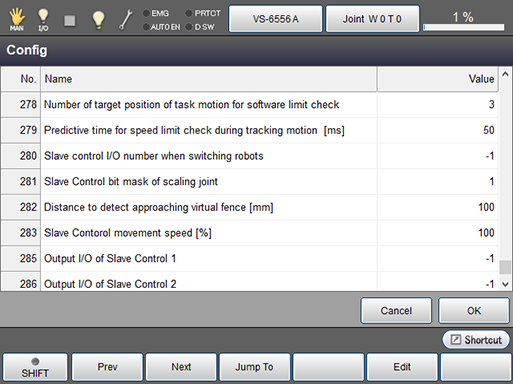
Parameters can be set in the window below.
Operation path : [F2 Arm] - [F6 Aux] - [F1 Config]
COBOTTA Button Setting
| No. | Parameter name | Default setting | Description |
|---|---|---|---|
| 285 | Output I/O of Slave Control 1 |
Disabled | Set the I/O number to switch ON/OFF when pressing the gripper plus button of COBOTTA. If "-1" is set, it is disabled. |
| 286 | Output I/O of Slave Control 2 | Disabled | Set the I/O number to switch ON/OFF when pressing the gripper minus button of COBOTTA. If "-1" is set, it is disabled. |
Others
| No. | Parameter name | Default setting | Description |
|---|---|---|---|
| 280 | Slave control I/O number when switching robots | -1 | Set I/O to output when the current robot is selected as the slave robot. If "-1" is set, it is disabled. |
| 281 | Slave Control bit mask of scaling joint | 1 | Set whether to scale the target following position sent from COBOTTA according to the maximum motion range of the slave robot. |
| 282 | Distance to detect approaching virtual fence [mm] | 100 | Set a distance from virtual fence to detect approaching if a function to make COBOTTA enable reaction force is enabled on the COBOTTA side when the slave robot approaches the virtual fence. |
| 283 | Slave Control movement speed [%] (*1) | 100 | Set the motion speed when the slave robot follows the master robot. If the following speed is low, the slave robot motion may be unstable and may not be able to follow normally. |
*1 : Even if you change the value of this parameter while connecting with COBOTTA, the setting will not be reflected. It will be reflected at the time of reconnection with COBOTTA.
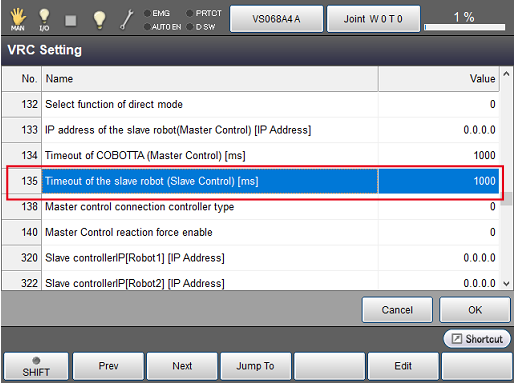
Timeout Setting
If timeout is extremely short, an error occurs when connecting with COBOTTA.
Before connecting, adjust a value of No.135 [Timeout of the slave robot (Slave Control)] from the VRC setting window. Recommended setting value is 1000[ms].
To edit the items of the [F6 VRC Setting], the log-in level needs to be the Maintainer.
Operation path : [F6 Setting] - [F2 System Info] - [F6 VRC Setting]
ID : 2686