
ID : 4897
Getting Extended-Joint Positions
You can obtain extended-joint positions in the following two ways:
- Use J-type variables to obtain the current positions
- Use both J-type variables and P-type variables to obtain the current positions collectively
Extended-joint positions can be stored in J-type variables in whichever way.
Use J-type Variables to Obtain the Positions of Extended-Joints and Robot Joints
In obtaining target positions, registering robot joints and extended-joints in the same arm group enables you to store the current position data of the robot joints and the extended-joints in the same variable number at the same time.
Getting The Variables
1
Set the arm group.
Operation path: Top screen-[F2 Arm]-[F12 Maintenance]-[F10 Joint Settings]-[F1 ArmGroup]
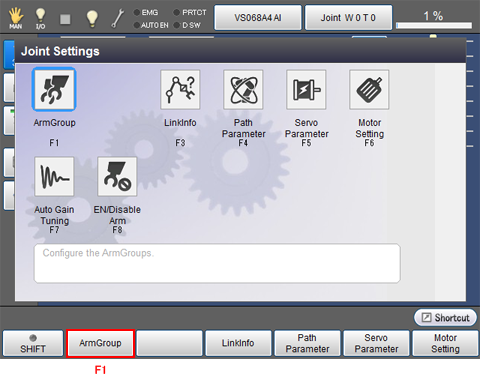
Arm Group setting window appears.
2
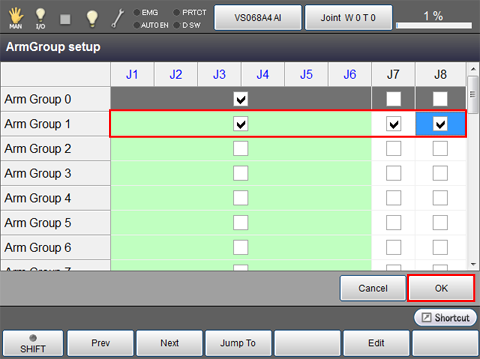
Check the joint number that you intend to configure.
The example below sets J1 to J6 and J7, J8 to the Arm group 1.
Once arm group setting is completed, press [OK].
3
Restart the controller.
4
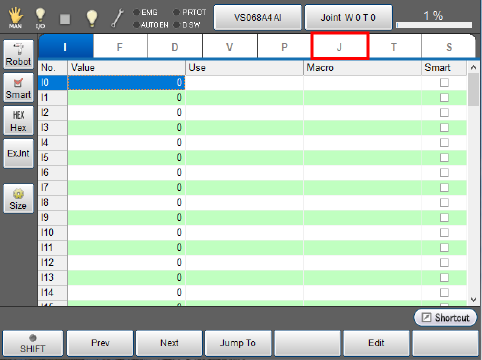
Top screen - [F3 Variables] - [J-type variables]
5
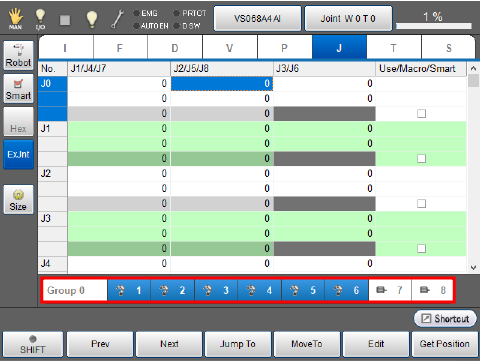
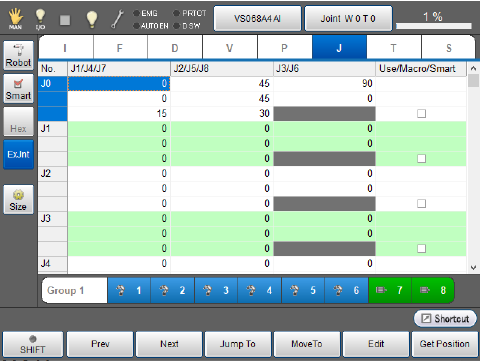
Click [ExJnt].
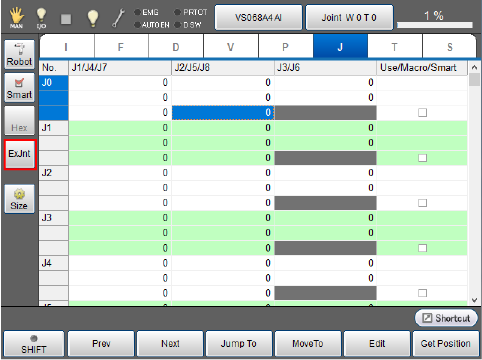
The display changes as follows.
- [Arm Group] bar is displayed on the bottom of the screen.
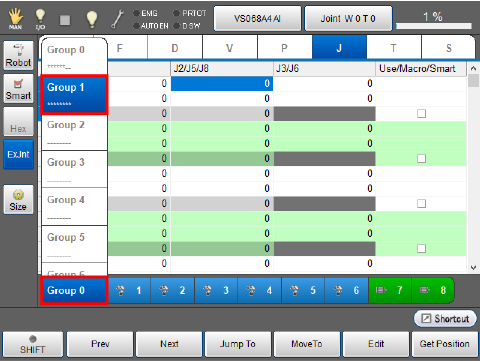
6
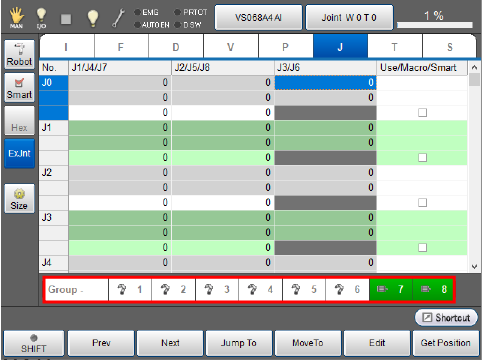
Press [Group -] to display a list of arm groups.
Select an arm group number that you intend to use.
In this example, "Group 1" is selected.
7
Move the robot and the extended-joints to the position desired.
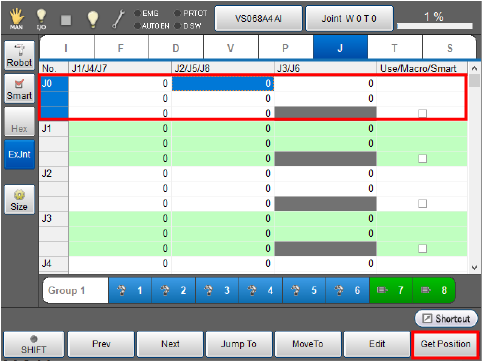
8
Select a variable to obtain position data, then press [F6 Get Position].
In this example, “J0” is selected.
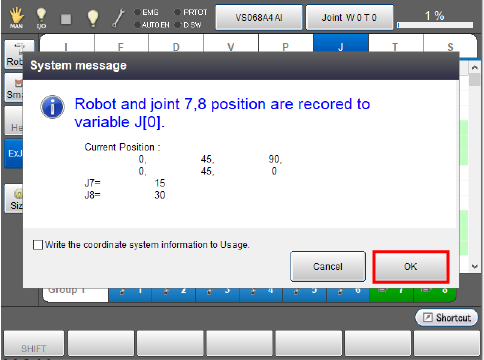
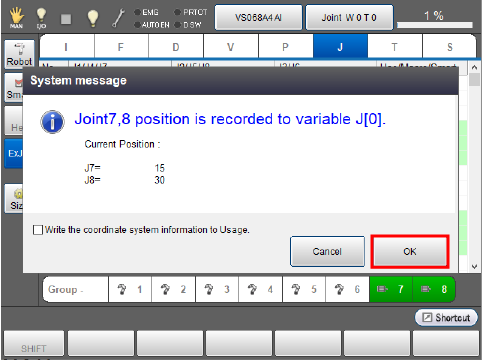
9
System message is displayed to confirm whether to store it in the variable. Press [OK] to store it.
The position data is not obtained if [Cancel] is pressed.
This stores the current position data of the robot joints and the extended-joints in J0.
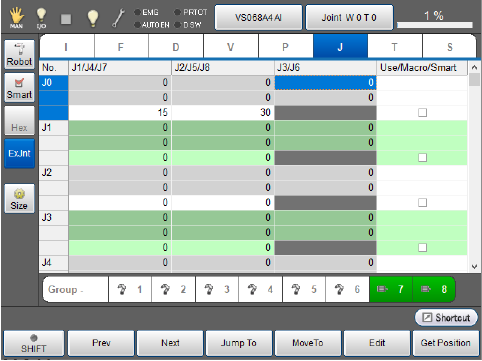
The stored position data is displayed as below.
Invalidating the robot joints in the arm group list enables you to obtain only the extended-joint position data without obtaining the current positions of the robot joints.
The example below shows that pressing any of the robot joint icons changes them from blue to white. This state means that all the robot joints are invalid.
In this state, pressing [Get Position] displays the confirmation window to obtain the position data.
Press [OK] to obtain only the extended-joint position data.
Use J-type and P-type Variables to Obtain the Positions of Extended-Joints and Robot Joints Collectively
In obtaining target positions, registering robot joints and extended-joints in the same arm group enables you to store the current robot joint position data in P-type variables and only the current extended-joint position data in the same J-type variable number at the same time.
Getting The Variables
1
Set the arm group.
Operation path: Top screen-[F2 Arm]-[F12 Maintenance]-[F10 Joint Settings]-[F1 ArmGroup]
Arm Group setting window appears.
2
Check the joint number that you intend to configure.
The example below sets J1 to J6 and J7, J8 to the Arm group 1.
Once arm group setting is completed, press [OK].
3
Restart the controller.
4
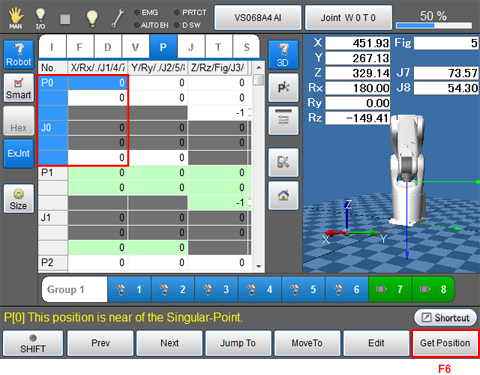
Top screen - [F3 Variables] - [P-type variables]
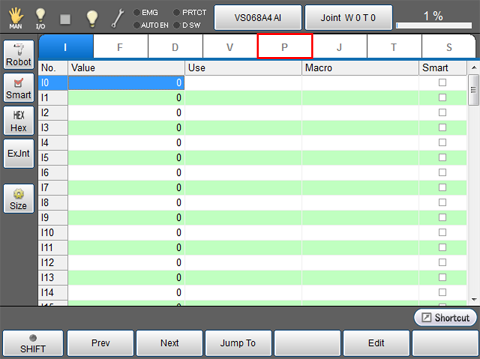
5
Click [ExJnt]
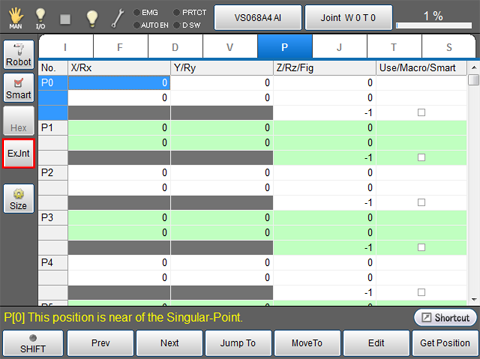
The display changes as follows.
- The display of the [No] column is changed. ("P0, P1, P2..." into "P0,J0,P1...")
- Values of P-type variables and J-type variables are displayed in one table.
- [Arm Group] bar is displayed on the bottom of the screen.
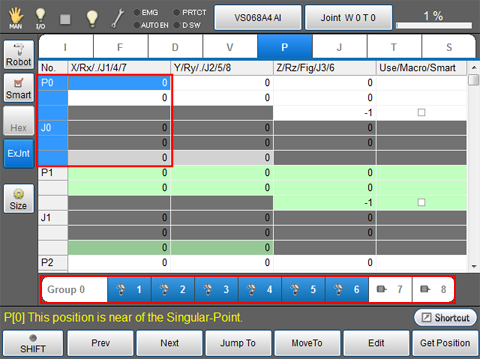
6
Press [Group 0] to display a list of Arm group.
Select an arm group number that you intend to use.
In this example, "Group 1" is selected.
7
Move the robot and extended-joints to the position desired.
8
Select a variable to obtain position data, then press [F6 Get Position].
In this example, P0/J0 is selected.
9
System message is displayed to confirm whether to store it in the variable. Press [OK] to store it.
The position data is not obtained if [Cancel] is pressed.
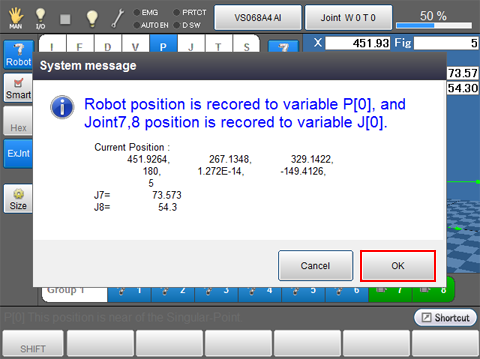
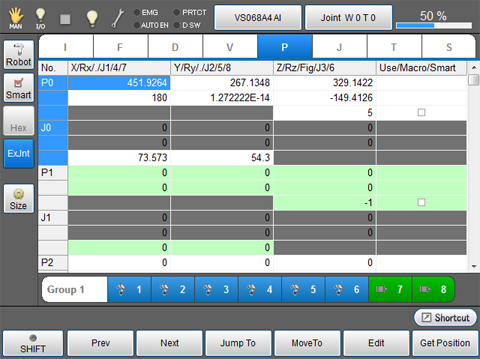
The stored position data is displayed as follows.
ID : 4897