
ID : 4903
Setting the Radius of Gyration
The global type of the controller limits the motion speed of both robot joints and extended-joints being driven to a maximum of 250 mm/sec in Manual or Teach check mode.
Using an extended-joint as a rotational joint requires specifying the radius of gyration of the extended-joint as a parameter.
Notes for Setting Up the Radius of Gyration
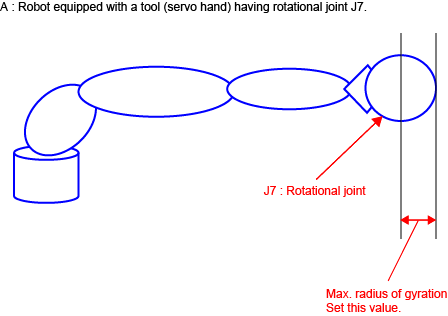
- When the robot is equipped with a tool (e.g., servo hand) having rotational joint J7 as shown in figure A, specify the radius of gyration of the rotational joint as a parameter.
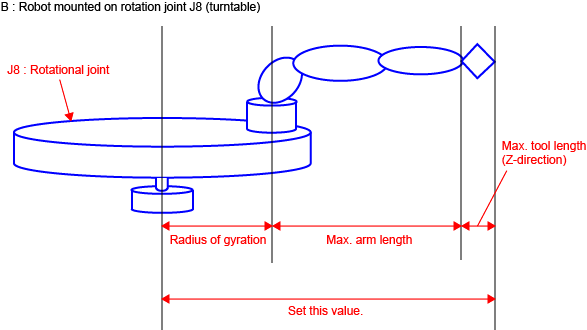
- When the robot is mounted on rotational joint J8 (e.g., turntable) as shown in figure B, it is necessary to specify the total value of the "Radius of gyration of J8," "Maximum arm length of the robot(see table below) " and "Maximum Z-direction length of the tool" as a parameter.
- In the combination of figure A and B, that is, when the robot is mounted on rotation joint J8 (e.g., turntable) and it is equipped with a tool (e.g., servo hand) having rotational joint J7, it is necessary to specify the related parameters for each joint.
Robot Models and Max. Arm Length
| Series | Robot type | Max. Arm Length (mm) |
|---|---|---|
| VP | VP-5243 | 430 |
| VP-6242 | 432 | |
| VS | VS-6556 | 653 |
| VS-6577 | 854 | |
| VS-050 | 505 | |
| VS-060 | 605 | |
| VS-068 | 710 | |
| VS-087 | 905 | |
| VM | VM-6083 | 1021 |
| VM-60B1 | 1298 | |
| HS | HS-4535* | 350 |
| HS-4545* | 450 | |
| HS-4555* | 550 | |
| HSA1 | HS035A1* | 350 |
| HS045A1* | 450 | |
| HS055A1* | 550 | |
| HSR | HSR048A1* | 480 |
| HSR055A1* | 550 | |
| HSR065A1* | 650 | |
| HM | HM-4060* | 600 |
| HM-4A60* | 600 | |
| HM-4070* | 700 | |
| HM-4A70* | 700 | |
| HM-4085* | 850 | |
| HM-4A85* | 850 | |
| HM-40A0* | 1000 | |
| HM-4AA0* | 1000 |
ID : 4903