
ID : 5086
Setting the Path Configuration Parameters
In this setting, path parameters, which are provided for motion definitions (including speed, acceleration, and range of motion) of extended-joints are configured.
The below shows how to configure these parameters with the teach pendant.
Displaying [Joint Settings] Window
Access: Top Screen — [F2 Arm] — [F12 Maintenance] — [F10 Joint Settings]
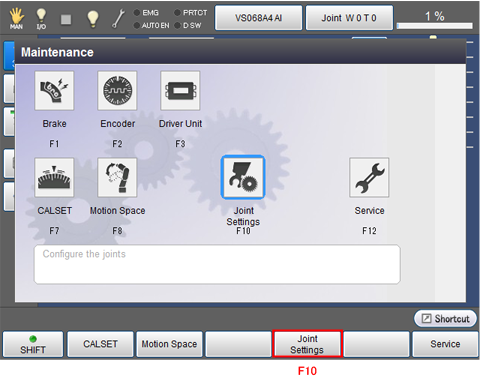
[Joint Settings] window is displayed.
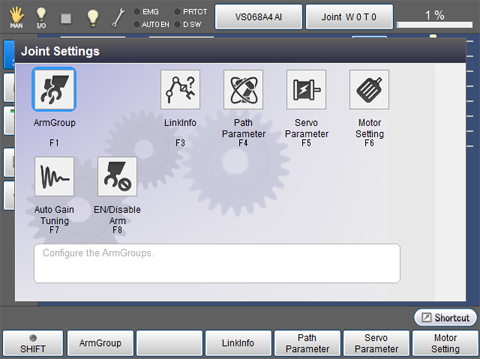
Setting Method for "Path Parameter for Joint"
1
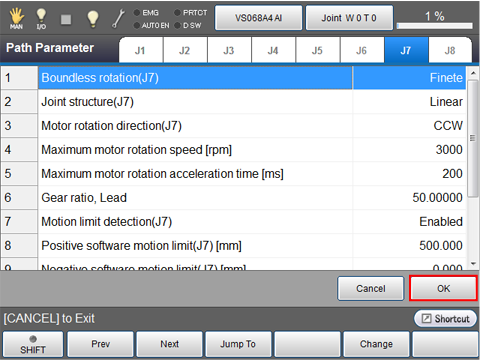
Press [Joint Settings] - [F4 Path Parameter] to display the window shown below.
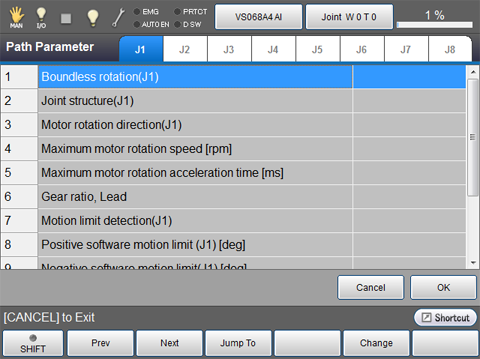
2
Select the tab to be configured.
The following examples are the displays when the 7th axis is selected.
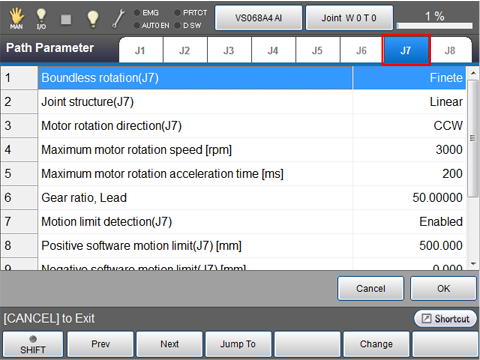
3
Change each setting of the "Path parameter for joint", then press [OK].
For details about each parameter, refer to "List of Path Configuration Parameters".
4
When all settings of the "Path parameter for joint" are completed, press [OK] button.
Changed parameter settings are saved, then return to the "Joint Settings" window.
List of Path Configuration Parameters
| Parameter name | Entry range | Factory default | Unit | Description | Remarks |
|---|---|---|---|---|---|
| Boundless rotation (Finete, Infinite) | "Finete" or "Infinite" | Finete | To rotate the motor 32768 times or more in the same direction, set this parameter to 1: Infinite. | Setting this parameter to "1: Infinite" requires the Motion limit detection parameter to be set to "0: Disabled". | |
| Joint structure (Linear, Rotate) | "Linear" or "Rotate" | Linear | If your optional mechanism to be connected to the specified motor has a sliding joint, then set 0: Linear; if a rotary joint, set 1:Rotate. | ||
| Motor rotation direction (CCW, CW) | "CCW" or "CW" | CCW | To convert the CCW rotation of the specified motor (when viewed from the load side) to the positive direction movement of the connected mechanism, set 0:CCW ; to convert it to the negative one, set 1:CW. | ||
| Maximum motor ratation speed [rpm] | 1 to 6000 | 3000 | rpm | Set the maximum speed of the specified motor. | |
| Maxinmum motor rotation acceleration time [ms] | 1 to 100000000 | 200 | ms | Set the motor acceleration time required for the specified motor to reach the maximum speed. | |
| Gear ratio, Lead | 0.00001 to 21474.83647 | 50.00000 | For rotary joints, set the deceleration ratio (motor rotation/joint rotation). For sliding joints, set the lead (movement) per motor rotation. | ||
| Motion limit detection | "Disabled" or "Enabled" | Enabled | To make the controller check the motion limit and issue an error if the specified joint is out of the range, set 1: Enabled. | Setting the Boundless rotation parameter to "1: Infinite" requires this parameter to be set to "0: Disabled". | |
| Positive software motion limit [mm], [deg] | -1000000 to 1000000 | 500 |
For rotary joints : deg For sliding joints : mm |
Set the positive motion limit. | |
| Negative software motion limit [mm], [deg] | -1000000 to 1000000 | 0.000 |
For rotary joints : deg For sliding joints : mm |
Set the negative motion limit. | |
| RANG [mm], [deg] | -21474.83648 to 21474.83648 | 0.00000 |
For rotary joints : deg For sliding joints : mm |
Set the RANG value. | |
| Rotation radius [mm] | 0 to 100000 | 1000 | mm |
For rotary joints, set the maximum radius of rotation. |
For details, see "Setting the radius of gyration". |
| AutoPositionClear | "Disabled" or "Enabled" | Enabled |
Set whether to execute POSCLR automatically. |
(Note1)
(Note2) |
Note1 :When [AutoPositionClear] is set to [Enabled], if the angle of the current position is the multiple of +360 degrees, Posclr will reset the axis to 0 degrees. However, it may set to +360 degrees due to the internal calculation error.
Also, the multiple of -360 degrees may set to -360 degrees.
Therefore, the motion command that has been written in immediately after Posclr may perform unexpected behavior.
Note2 :AutoPositionClear is not effective against an axis that is set for conveyor.
ID : 5086