
ID : 1744
Setting Work Coordinates by Easy Teaching
Operation path : [F2 Arm] - [F6 Aux] - [F4 Work] - [F4 Easy Edit]
Teach robot 3 points to register in the position coordinates (P type variable). Then, set the work coordinates using data of the registered position coordinates.
Press [F4 Easy Edit] to display the following [Work coordinate setup by teaching 3 points] window.
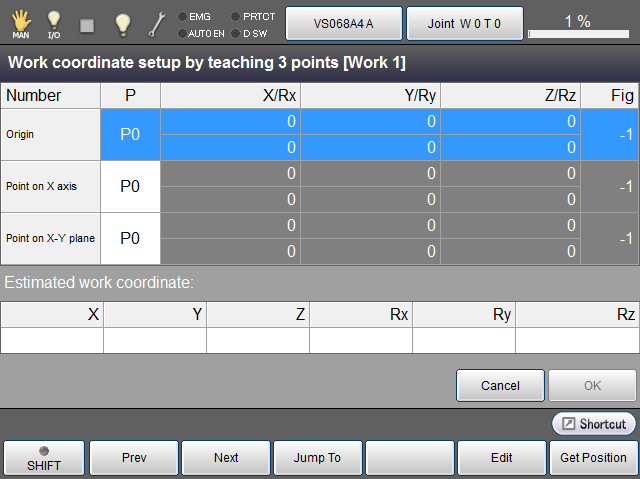
For each point, refer to the following table.
| Point on X axis | Specify a given point on the X-axis where X is greater than zero. |
|---|---|
| Point X-Y plane | Specify a given point on the X-Y plane where Y is greater than zero (the first quadrant and the second quadrant). Specifying a point where Y is smaller than zero may set the direction(s) of Y-axis and/or Z-axis to unexpected direction(s). If Y = 0 is specified, calculation result will not output because the calculation is impossible. |
Confirm the value of "estimated tool coordinate" when all P type variables are registered. Then press [OK] to reflect the resulting coordinate in the tool coordinate number 1.
If the "estimated tool coordinate" cannot be calculated, [OK] button is disabled.
For the 4-axis robot, Rx and Ry are ignored.
| Available function keys | |
|---|---|
| [F1 Prev] | Move to the previous page of the currently displayed registered point number. |
| [F2 Next] | Move to the next page of the currently displayed registered point number. |
| [F3 Jump To] |
Display numeric keypad. Enter the registered point number to select with numeric keypad, and press [OK] to display the registered point of the specified number. |
| [F5 Edit] |
Displays numeric keypad. Enter the P type variable number to register, and press [OK] on the numeric keypad to register the number of registered P type variable. |
| [F6 Get Position] |
Load a current position into a position coordinate (P type variable). Choose desired number and position coordinate(P type variable) and then press [OK] to load the current position. |
ID : 1744