
ID : 2022
Creating a New Cooperative Robot Project
Create a new robot project for cooperative control function operation from an existing WINCAPSIII project for both the master and slave robot, respectively.
An existing WINCAPSIII project mentioned here should be obtained from the actual robot. If you send a project whose setting values of IO devices and/or variables are different by "Sending and Receiving a Project for Cooperative Control Function at One Time", setting values on the actual robot will be overwritten.
While the cooperative control is used, if values of the "Pass Motion setting" configuration parameter are different between a master robot and a slave robot, or if the parameter is set to 1 for all robots, those robots may not move to their target positions synchronously when Continue Start is executed during the synchronous motion. Therefore, set to 0 of the "Pass Motion setting" configuration parameter for all robots (the master robot and slave robots).
1
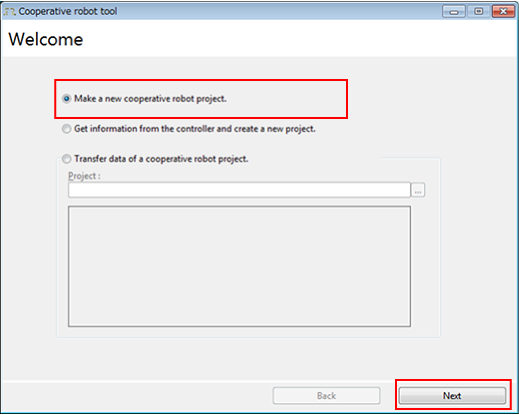
Select Make a new cooperative robot project.
Press the Next button.
2
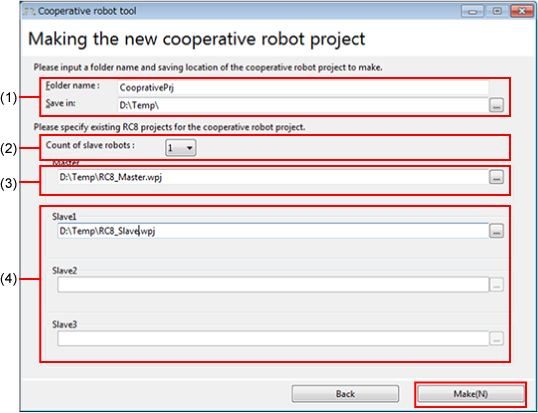
Enter the following items;
1: Folder name and location of a newly created project
2: Number of slave robot used
3: Project for the master controller
4: Project for each slave controller.
Once you have entered all items, click "Make(N)".
3
Click "OK" to close the window.
ID : 2022