
ID : 3053
Convenient Functions of Virtual Fence
This explains the function of Virtual Fence for more convenient use.
Pre-Check Command
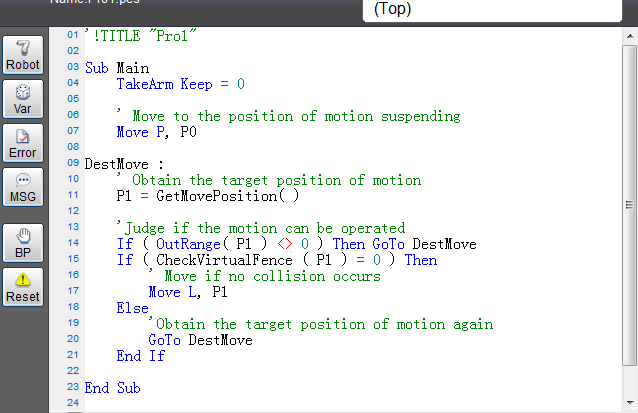
CheckVirtualFence command checks the collision status between robot and equipment at the target position when VirtualFence is enabled.
When operating the robot, if the function of VirtualFence detect the possibility of the collision between the robot and equipment, an error occurs and the robot will stop. However, CheckVirtualFence command can check the collision between robot and equipment at the target position without operating the robot; programming by the non-stop operation of the robot is possible.
It is convenient to use this function for the equipment, such as vision picking, where the target position changes while operating.
For details, refer to the "CheckVirtualFence" of PROGRAMMER'S MANUAL.
This command is available in Ver.2.3.* or higher.
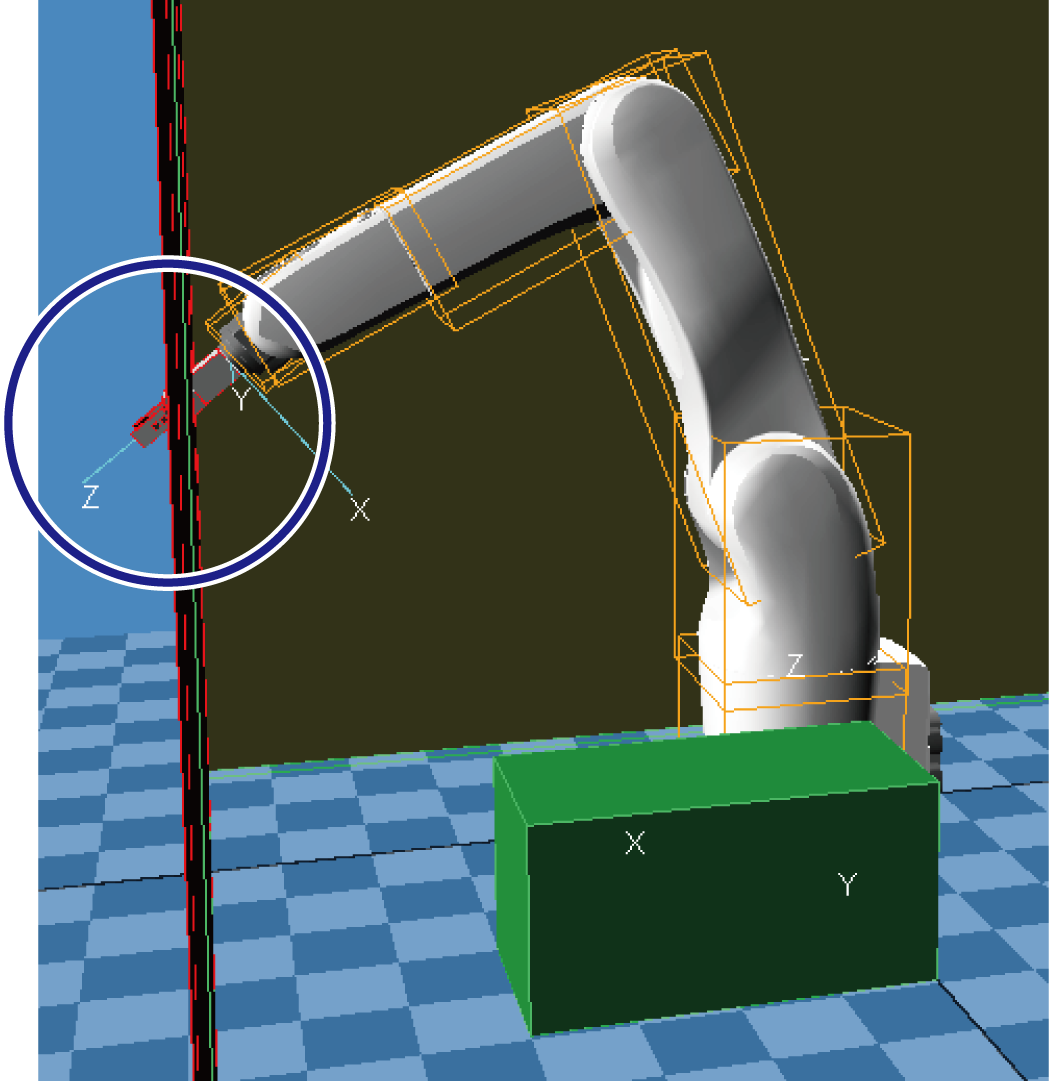
Displaying the Collision Status
Function of Displaying the Collision Status discloses which monitoring model collides with when the collision detected between the monitoring models with WINCAPSIII.
To use this function makes modifying the models or motions easier while adjusting the monitoring models.
For details, refer to "Collision Detection" in the "Arm Menu" under the WINCAPSIII GUIDE.
This function is available in Ver.2.3.* or higher.
ID : 3053