
ID : 1716
Emergency Stop
Pressing the emergency stop button halts currently running all programs and the robot stops. The motor power turns OFF at this timing.
Operation Procedures
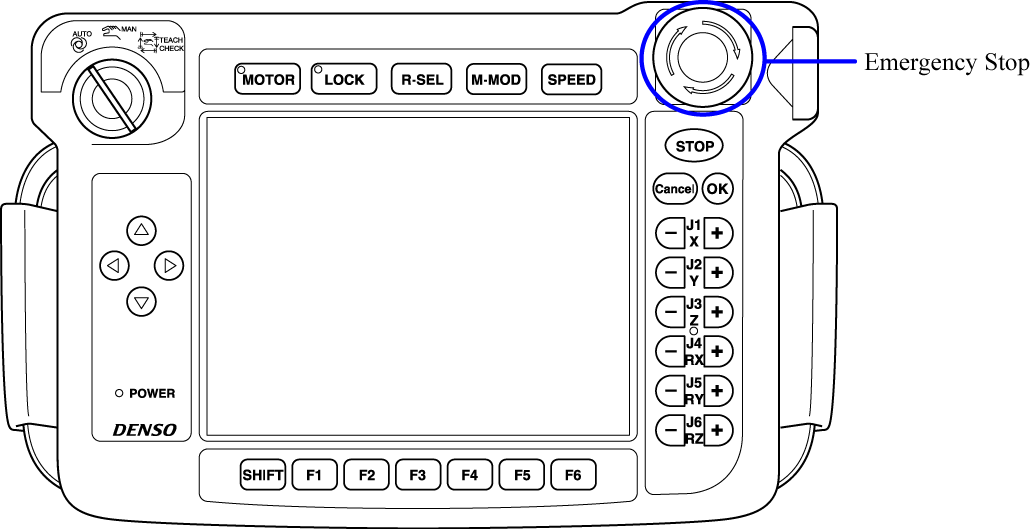
Press [Emergency stop] button on the tech pendant.
Restarting the robot after an emergency stop executes the selected program from the first line.
To restart the robot, first turn the motor power ON, then execute any of the "step start," "cycle start," or "continuous start."
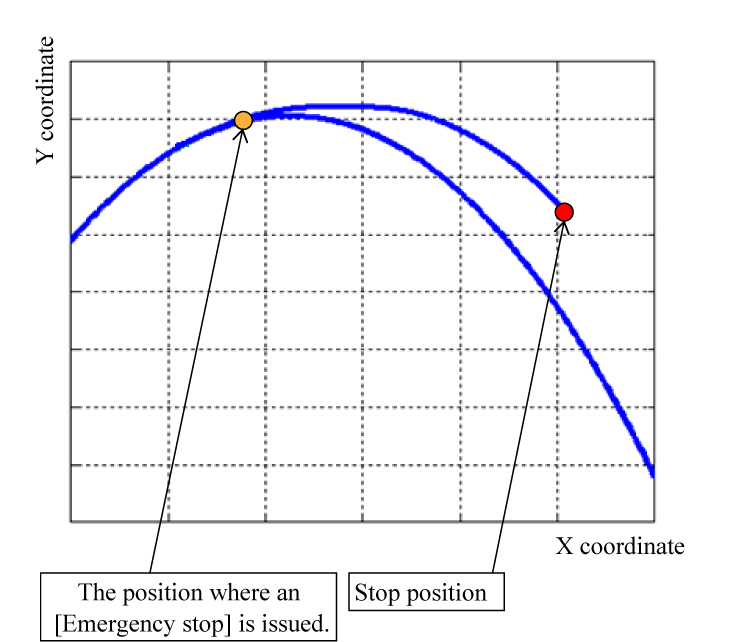
- Motor will be turned off at the emergency stop; however, robot may unexpectedly move by inertia.
- Make sure that there is no danger such as collision or accident in advance when restarting robot after emergency stop.If the robot is restarted as it is after emergency stop, it will execute the selected program from beginning.
Difference of Stop Process in the Controller's Version
Version 2.1.* or higher
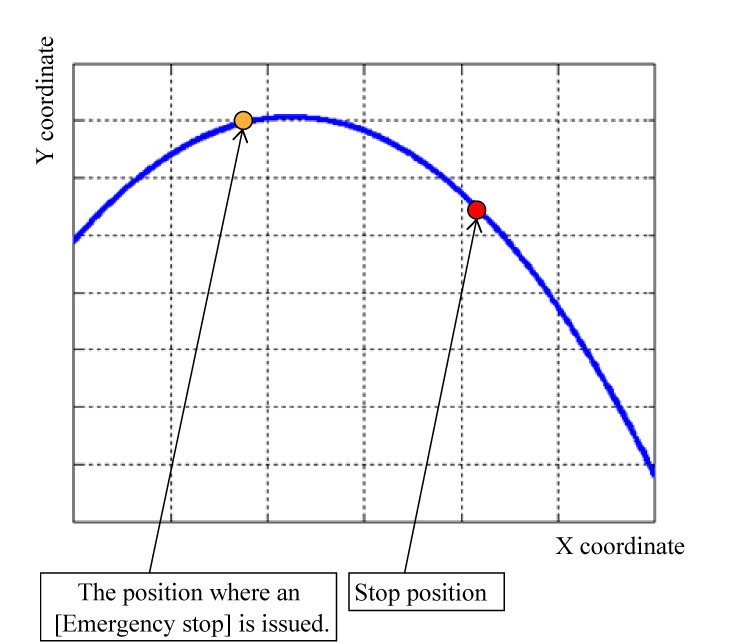
All axes synchronize the motion and stop at the same time. The robot stops on the planned path.
- Speed
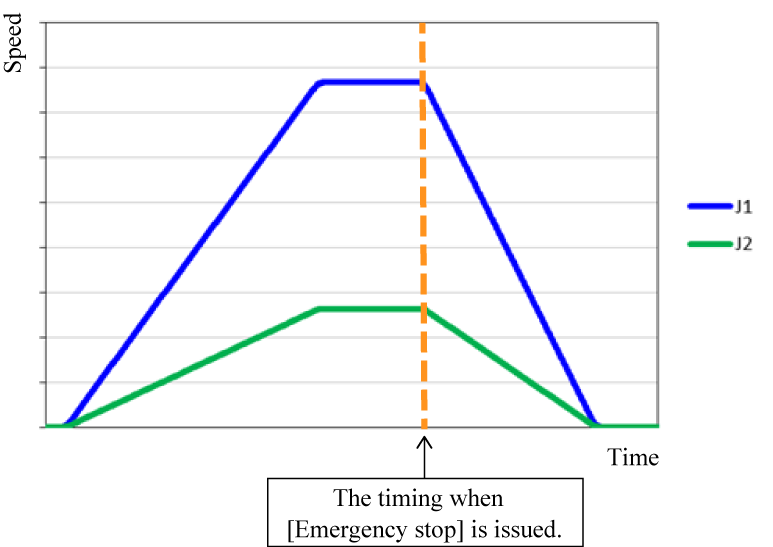
- Path
Version 2.0.* or before
Each axis stops with the maximum deceleration speed respectively.
- Speed
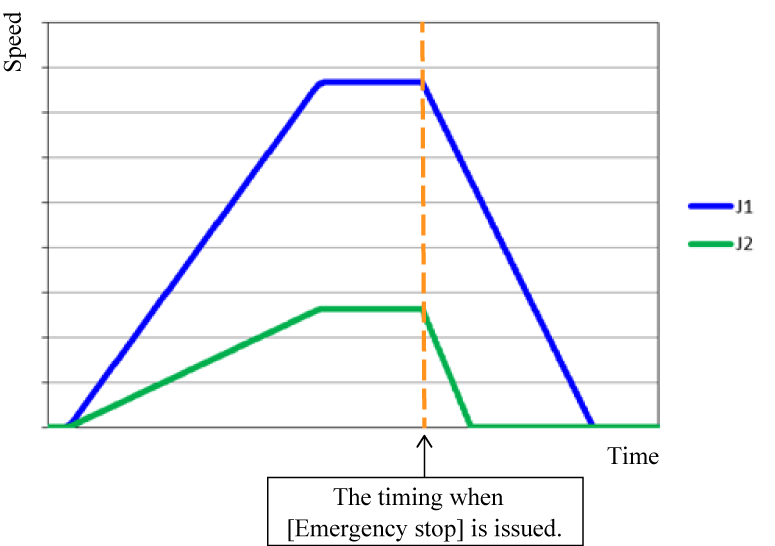
- Path
If your controller is version 2.1.* or higher, you can select the stop process for the version 2.0.* or before as well. To do so, set the VRC parameter [48 : Stop process of robots at the emergency stop] to [0 : Stop at the axis maximum deceleration]. Please set the user level to [Maintainer] before the change.
Reboot the controller after you change the parameter.
ID : 1716